 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobal Incremental Flight Control for Agile Maneuvering of a Tailsitter Flying Wing
Paper and Code
Jul 26, 2022
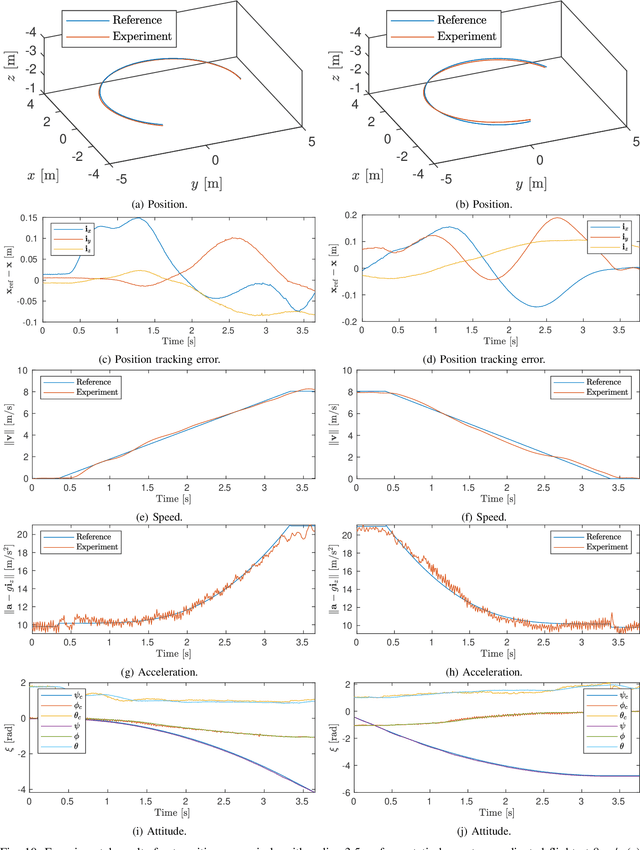


This paper proposes a novel control law for accurate tracking of agile trajectories using a tailsitter flying wing unmanned aerial vehicle (UAV) that transitions between vertical take-off and landing (VTOL) and forward flight. The global control formulation enables maneuvering throughout the flight envelope, including uncoordinated flight with sideslip. Differential flatness of the nonlinear tailsitter dynamics with a simplified aerodynamics model is shown. Using the flatness transform, the proposed controller incorporates tracking of the position reference along with its derivatives velocity, acceleration and jerk, as well as the yaw reference and yaw rate. The inclusion of jerk and yaw rate references through an angular velocity feedforward term improves tracking of trajectories with fast-changing accelerations. The controller does not depend on extensive aerodynamic modeling but instead uses incremental nonlinear dynamic inversion (INDI) to compute control updates based on only a local input-output relation, resulting in robustness against discrepancies in the simplified aerodynamics equations. Exact inversion of the nonlinear input-output relation is achieved through the derived flatness transform. The resulting control algorithm is extensively evaluated in flight tests, where it demonstrates accurate trajectory tracking and challenging agile maneuvers, such as sideways flight and aggressive transitions while turning.