 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Sampling-based Online Planning for Drone Interception
Feb 20, 2025This paper studies high-speed online planning in dynamic environments. The problem requires finding time-optimal trajectories that conform to system dynamics, meeting computational constraints for real-time adaptation, and accounting for uncertainty from environmental changes. To address these challenges, we propose a sampling-based online planning algorithm that leverages neural network inference to replace time-consuming nonlinear trajectory optimization, enabling rapid exploration of multiple trajectory options under uncertainty. The proposed method is applied to the drone interception problem, where a defense drone must intercept a target while avoiding collisions and handling imperfect target predictions. The algorithm efficiently generates trajectories toward multiple potential target drone positions in parallel. It then assesses trajectory reachability by comparing traversal times with the target drone's predicted arrival time, ultimately selecting the minimum-time reachable trajectory. Through extensive validation in both simulated and real-world environments, we demonstrate our method's capability for high-rate online planning and its adaptability to unpredictable movements in unstructured settings.
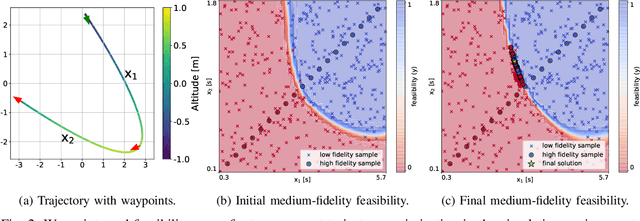
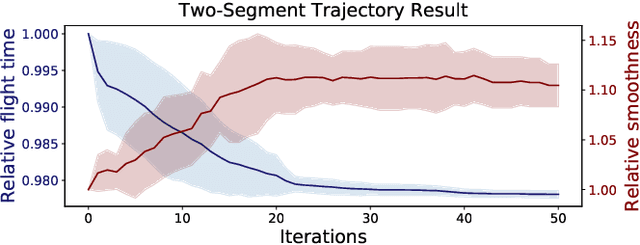
Multi-Fidelity Reinforcement Learning for Time-Optimal Quadrotor Re-planning
Mar 13, 2024High-speed online trajectory planning for UAVs poses a significant challenge due to the need for precise modeling of complex dynamics while also being constrained by computational limitations. This paper presents a multi-fidelity reinforcement learning method (MFRL) that aims to effectively create a realistic dynamics model and simultaneously train a planning policy that can be readily deployed in real-time applications. The proposed method involves the co-training of a planning policy and a reward estimator; the latter predicts the performance of the policy's output and is trained efficiently through multi-fidelity Bayesian optimization. This optimization approach models the correlation between different fidelity levels, thereby constructing a high-fidelity model based on a low-fidelity foundation, which enables the accurate development of the reward model with limited high-fidelity experiments. The framework is further extended to include real-world flight experiments in reinforcement learning training, allowing the reward model to precisely reflect real-world constraints and broadening the policy's applicability to real-world scenarios. We present rigorous evaluations by training and testing the planning policy in both simulated and real-world environments. The resulting trained policy not only generates faster and more reliable trajectories compared to the baseline snap minimization method, but it also achieves trajectory updates in 2 ms on average, while the baseline method takes several minutes.
Aerobatic Trajectory Generation for a VTOL Fixed-Wing Aircraft Using Differential Flatness
Jul 07, 2022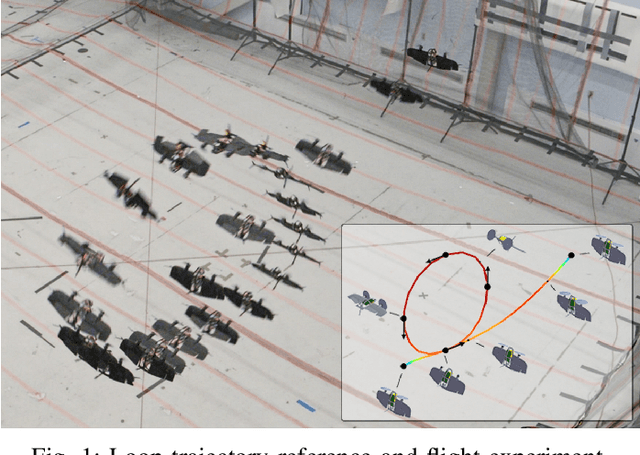
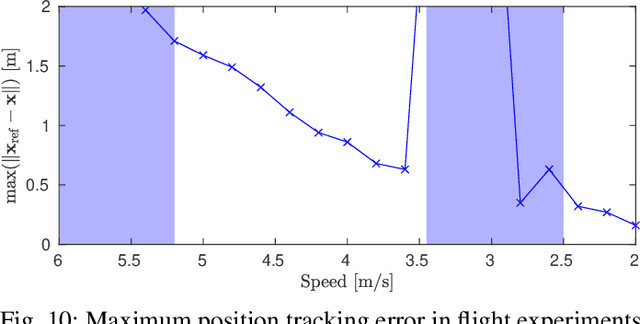
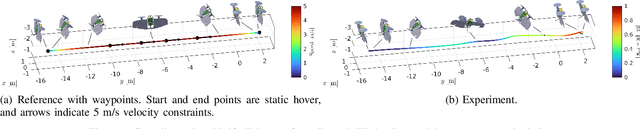
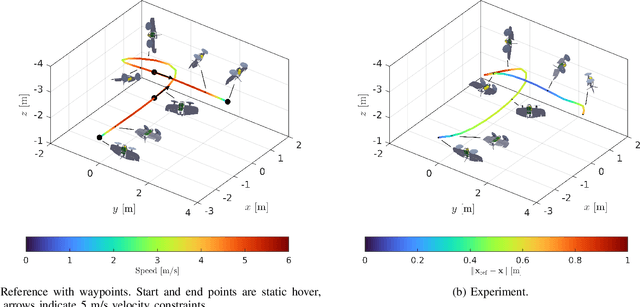
This paper proposes a novel algorithm for aerobatic trajectory generation for a vertical take-off and landing (VTOL) tailsitter flying wing aircraft. The algorithm differs from existing approaches for fixed-wing trajectory generation, as it considers a realistic six-degree-of-freedom (6DOF) flight dynamics model, including aerodynamics equations. Using a global dynamics model enables the generation of aerobatics trajectories that exploit the entire flight envelope, enabling agile maneuvering through the stall regime, sideways uncoordinated flight, inverted flight etc. The method uses the differential flatness property of the global tailsitter flying wing dynamics, which is derived in this work. By performing snap minimization in the differentially flat output space, a computationally efficient algorithm, suitable for online motion planning, is obtained. The algorithm is demonstrated in extensive flight experiments encompassing six aerobatics maneuvers, a time-optimal drone racing trajectory, and an airshow-like aerobatic sequence for three tailsitter aircraft.
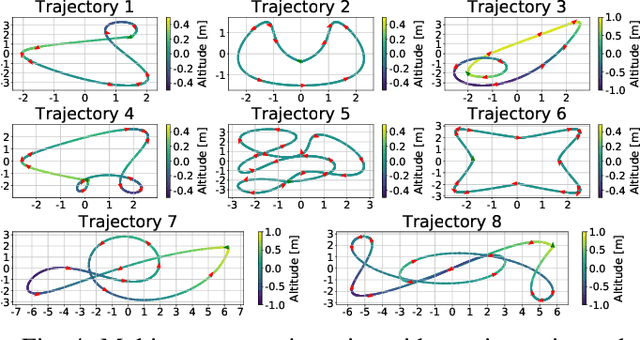
Cooperative Multi-Agent Trajectory Generation with Modular Bayesian Optimization
Jun 01, 2022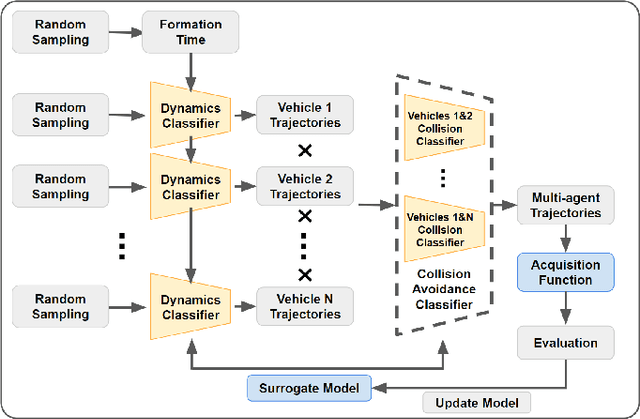
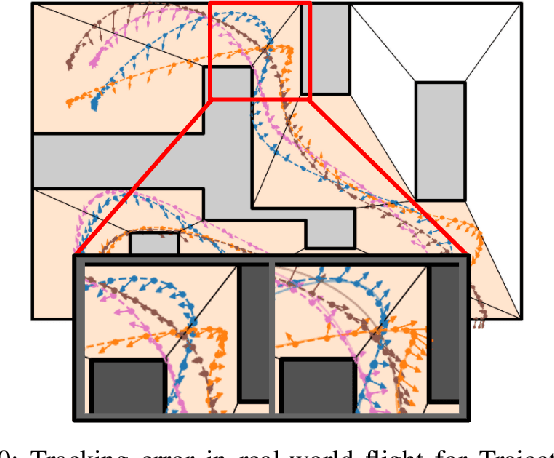
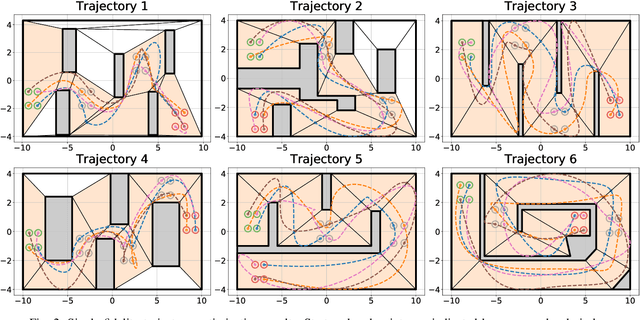
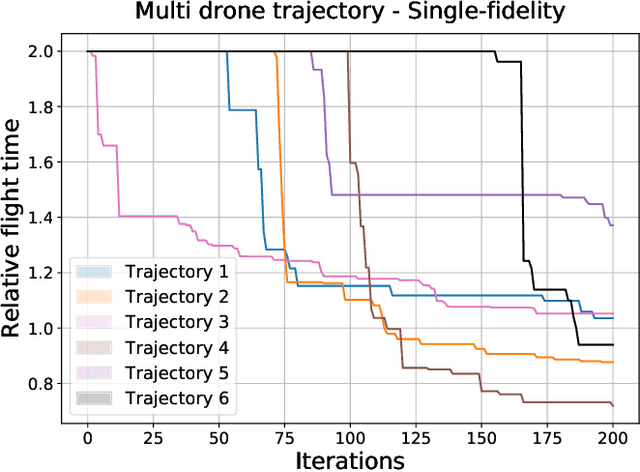
We present a modular Bayesian optimization framework that efficiently generates time-optimal trajectories for a cooperative multi-agent system, such as a team of UAVs. Existing methods for multi-agent trajectory generation often rely on overly conservative constraints to reduce the complexity of this high-dimensional planning problem, leading to suboptimal solutions. We propose a novel modular structure for the Bayesian optimization model that consists of multiple Gaussian process surrogate models that represent the dynamic feasibility and collision avoidance constraints. This modular structure alleviates the stark increase in computational cost with problem dimensionality and enables the use of minimal constraints in the joint optimization of the multi-agent trajectories. The efficiency of the algorithm is further improved by introducing a scheme for simultaneous evaluation of the Bayesian optimization acquisition function and random sampling. The modular BayesOpt algorithm was applied to optimize multi-agent trajectories through six unique environments using multi-fidelity evaluations from various data sources. It was found that the resulting trajectories are faster than those obtained from two baseline methods. The optimized trajectories were validated in real-world experiments using four quadcopters that fly within centimeters of each other at speeds up to 7.4 m/s.
Multi-Fidelity Black-Box Optimization for Time-Optimal Quadrotor Maneuvers
Jun 03, 2020
We consider the problem of generating a time-optimal quadrotor trajectory that attains a set of prescribed waypoints. This problem is challenging since the optimal trajectory is located on the boundary of the set of dynamically feasible trajectories. This boundary is hard to model as it involves limitations of the entire system, including hardware and software, in agile high-speed flight. In this work, we propose a multi-fidelity Bayesian optimization framework that models the feasibility constraints based on analytical approximation, numerical simulation, and real-world flight experiments. By combining evaluations at different fidelities, trajectory time is optimized while keeping the number of required costly flight experiments to a minimum. The algorithm is thoroughly evaluated in both simulation and real-world flight experiments at speeds up to 11 m/s. Resulting trajectories were found to be significantly faster than those obtained through minimum-snap trajectory planning.
FlightGoggles: Photorealistic Sensor Simulation for Perception-driven Robotics using Photogrammetry and Virtual Reality
May 27, 2019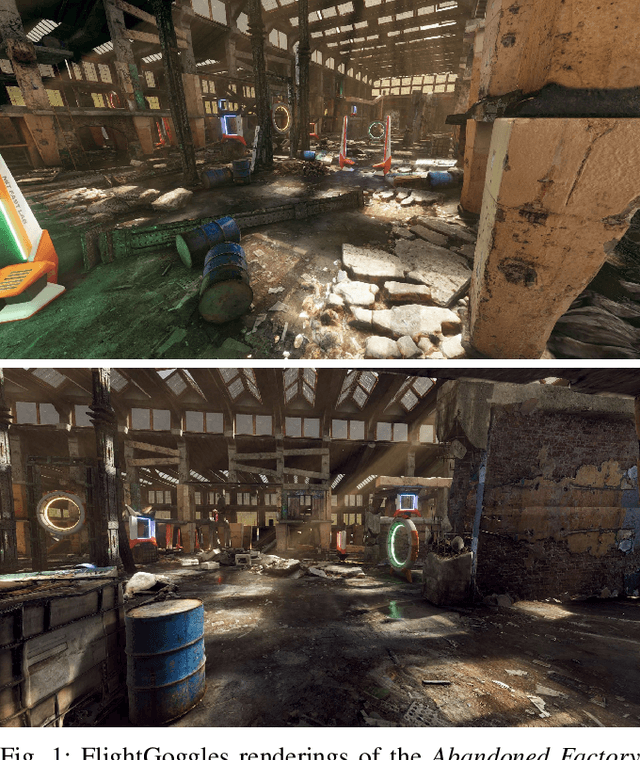
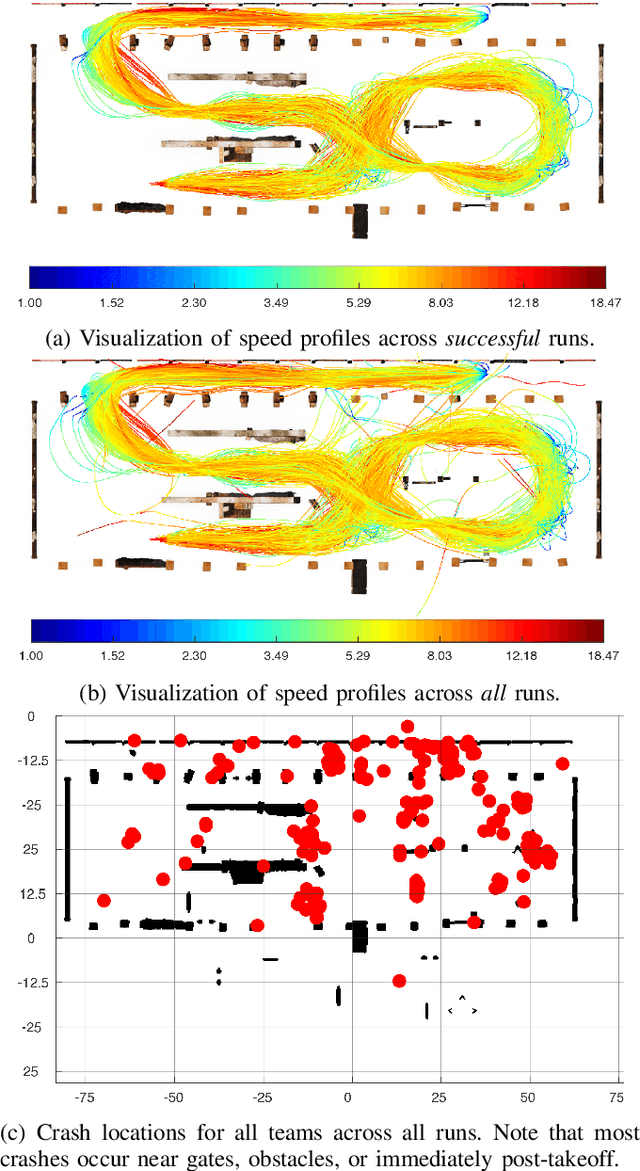
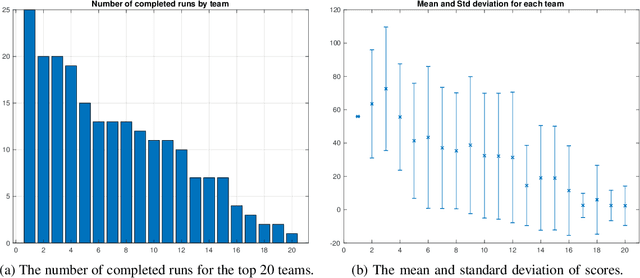
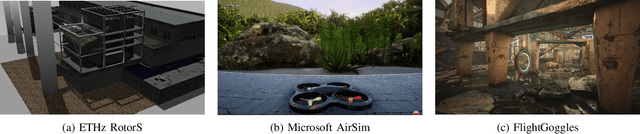
FlightGoggles is a photorealistic sensor simulator for perception-driven robotic vehicles. The key contributions of FlightGoggles are twofold. First, FlightGoggles provides photorealistic exteroceptive sensor simulation using graphics assets generated with photogrammetry. Second, it also provides the ability to combine $\textit{(i)}$ synthetic exteroceptive measurements generated $\textit{in silico}$ in real time and $\textit{(ii)}$ vehicle dynamics and proprioceptive measurements generated $\textit{in motio}$ by vehicle(s) in flight in a motion-capture facility. FlightGoggles is capable of simulating a virtual-reality environment around autonomous vehicle(s) in flight. While a vehicle is in flight in the FlightGoggles virtual reality environment, exteroceptive sensors are rendered synthetically in real time while all complex extrinsic dynamics are generated organically through the natural interactions of the vehicle. The FlightGoggles framework allows for researchers to accelerate development by circumventing the need to estimate complex and hard-to-model interactions such as aerodynamics, motor mechanics, battery electrochemistry, and behavior of other agents. The ability to perform vehicle-in-the-loop experiments with photorealistic exteroceptive sensor simulation facilitates novel research directions involving, $\textit{e.g.}$, fast and agile autonomous flight in obstacle-rich environments, safe human interaction, and flexible sensor selection. FlightGoggles has been utilized as the main test for selecting nine teams that will advance in the AlphaPilot autonomous drone racing challenge. Subsequently, FlightGoggles has been actively used by the community. We survey approaches and results from the top twenty AlphaPilot teams, which may be of independent interest.