 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Perceptual Measure for Deep Single Image Camera Calibration
Apr 22, 2018
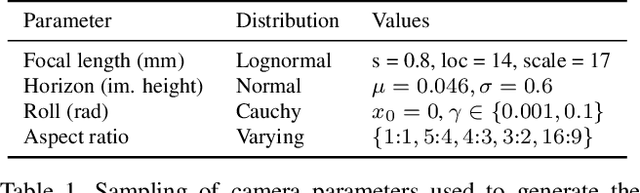
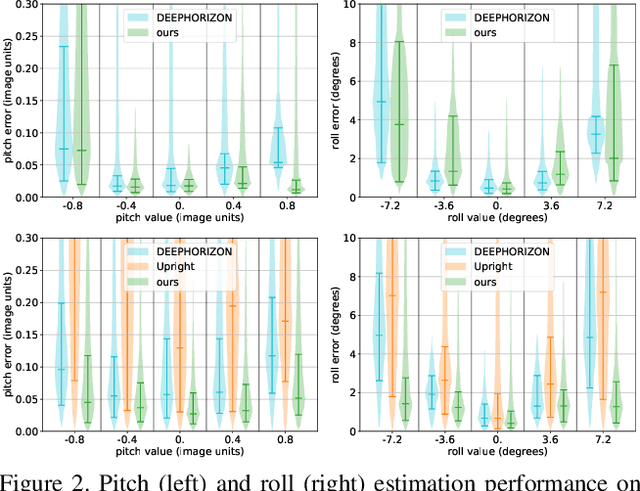
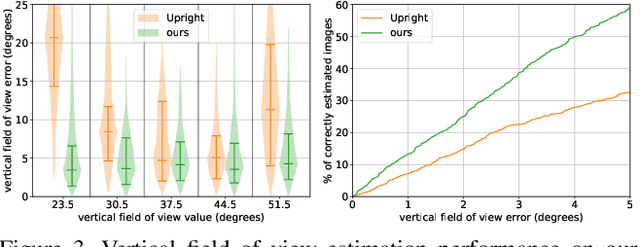
Most current single image camera calibration methods rely on specific image features or user input, and cannot be applied to natural images captured in uncontrolled settings. We propose directly inferring camera calibration parameters from a single image using a deep convolutional neural network. This network is trained using automatically generated samples from a large-scale panorama dataset, and considerably outperforms other methods, including recent deep learning-based approaches, in terms of standard L2 error. However, we argue that in many cases it is more important to consider how humans perceive errors in camera estimation. To this end, we conduct a large-scale human perception study where we ask users to judge the realism of 3D objects composited with and without ground truth camera calibration. Based on this study, we develop a new perceptual measure for camera calibration, and demonstrate that our deep calibration network outperforms other methods on this measure. Finally, we demonstrate the use of our calibration network for a number of applications including virtual object insertion, image retrieval and compositing.
Deep Outdoor Illumination Estimation
Apr 11, 2018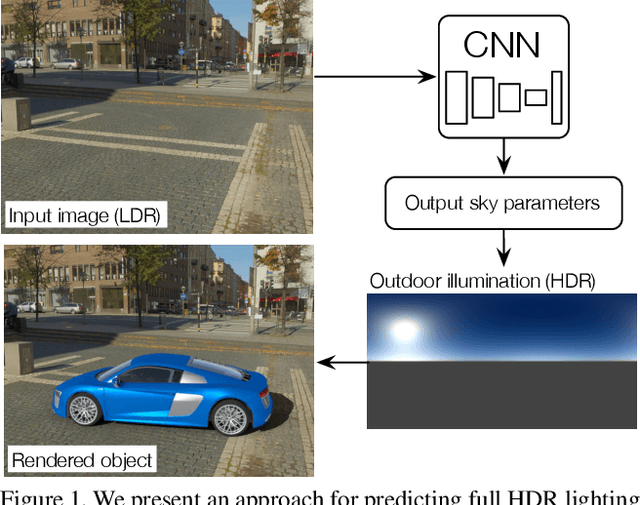
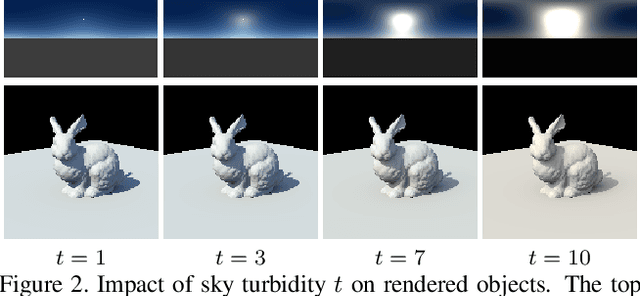
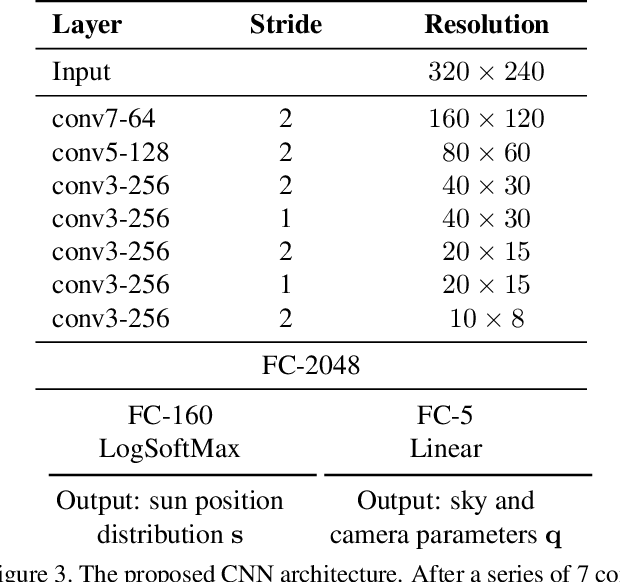
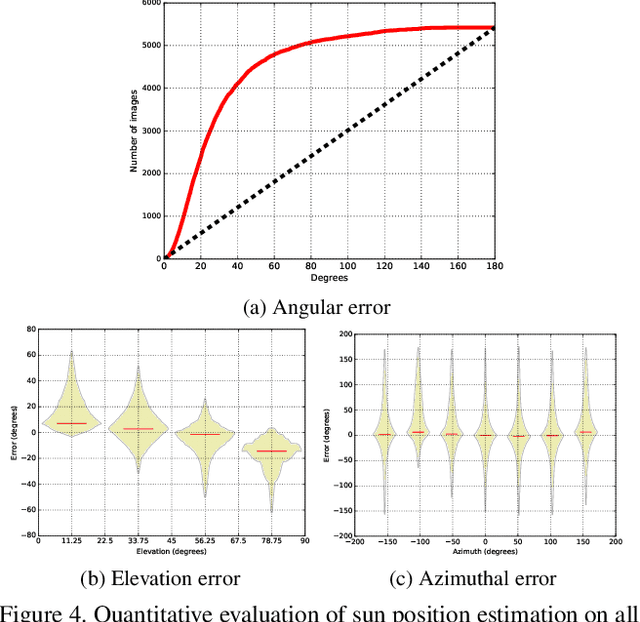
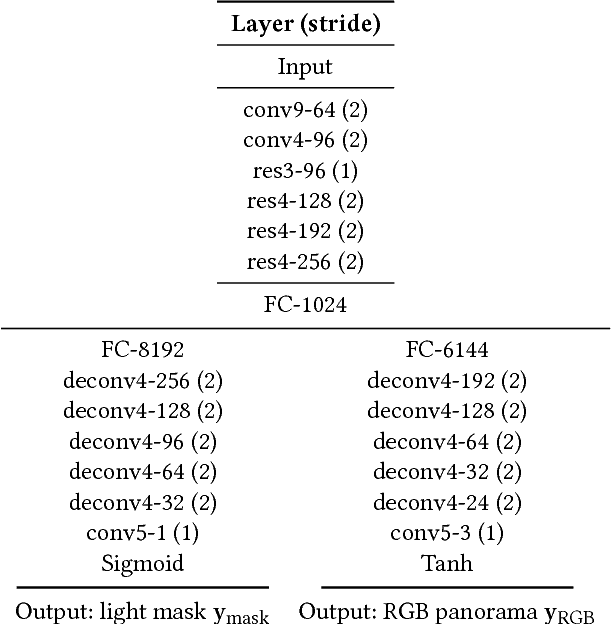
We present a CNN-based technique to estimate high-dynamic range outdoor illumination from a single low dynamic range image. To train the CNN, we leverage a large dataset of outdoor panoramas. We fit a low-dimensional physically-based outdoor illumination model to the skies in these panoramas giving us a compact set of parameters (including sun position, atmospheric conditions, and camera parameters). We extract limited field-of-view images from the panoramas, and train a CNN with this large set of input image--output lighting parameter pairs. Given a test image, this network can be used to infer illumination parameters that can, in turn, be used to reconstruct an outdoor illumination environment map. We demonstrate that our approach allows the recovery of plausible illumination conditions and enables photorealistic virtual object insertion from a single image. An extensive evaluation on both the panorama dataset and captured HDR environment maps shows that our technique significantly outperforms previous solutions to this problem.
Learning to Predict Indoor Illumination from a Single Image
Nov 21, 2017

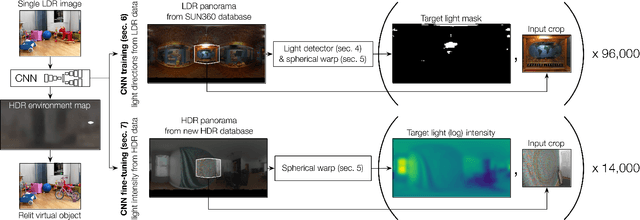
We propose an automatic method to infer high dynamic range illumination from a single, limited field-of-view, low dynamic range photograph of an indoor scene. In contrast to previous work that relies on specialized image capture, user input, and/or simple scene models, we train an end-to-end deep neural network that directly regresses a limited field-of-view photo to HDR illumination, without strong assumptions on scene geometry, material properties, or lighting. We show that this can be accomplished in a three step process: 1) we train a robust lighting classifier to automatically annotate the location of light sources in a large dataset of LDR environment maps, 2) we use these annotations to train a deep neural network that predicts the location of lights in a scene from a single limited field-of-view photo, and 3) we fine-tune this network using a small dataset of HDR environment maps to predict light intensities. This allows us to automatically recover high-quality HDR illumination estimates that significantly outperform previous state-of-the-art methods. Consequently, using our illumination estimates for applications like 3D object insertion, we can achieve results that are photo-realistic, which is validated via a perceptual user study.