 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLanguage Models Enable Data-Augmented Synthesis Planning for Inorganic Materials
Jun 14, 2025Inorganic synthesis planning currently relies primarily on heuristic approaches or machine-learning models trained on limited datasets, which constrains its generality. We demonstrate that language models, without task-specific fine-tuning, can recall synthesis conditions. Off-the-shelf models, such as GPT-4.1, Gemini 2.0 Flash and Llama 4 Maverick, achieve a Top-1 precursor-prediction accuracy of up to 53.8 % and a Top-5 performance of 66.1 % on a held-out set of 1,000 reactions. They also predict calcination and sintering temperatures with mean absolute errors below 126 {\deg}C, matching specialized regression methods. Ensembling these language models further enhances predictive accuracy and reduces inference cost per prediction by up to 70 %. We subsequently employ language models to generate 28,548 synthetic reaction recipes, which we combine with literature-mined examples to pretrain a transformer-based model, SyntMTE. After fine-tuning on the combined dataset, SyntMTE reduces mean-absolute error in sintering temperature prediction to 73 {\deg}C and in calcination temperature to 98 {\deg}C. This strategy improves models by up to 8.7 % compared with baselines trained exclusively on experimental data. Finally, in a case study on Li7La3Zr2O12 solid-state electrolytes, we demonstrate that SyntMTE reproduces the experimentally observed dopant-dependent sintering trends. Our hybrid workflow enables scalable, data-efficient inorganic synthesis planning.
Retro-Rank-In: A Ranking-Based Approach for Inorganic Materials Synthesis Planning
Feb 07, 2025Retrosynthesis strategically plans the synthesis of a chemical target compound from simpler, readily available precursor compounds. This process is critical for synthesizing novel inorganic materials, yet traditional methods in inorganic chemistry continue to rely on trial-and-error experimentation. Emerging machine-learning approaches struggle to generalize to entirely new reactions due to their reliance on known precursors, as they frame retrosynthesis as a multi-label classification task. To address these limitations, we propose Retro-Rank-In, a novel framework that reformulates the retrosynthesis problem by embedding target and precursor materials into a shared latent space and learning a pairwise ranker on a bipartite graph of inorganic compounds. We evaluate Retro-Rank-In's generalizability on challenging retrosynthesis dataset splits designed to mitigate data duplicates and overlaps. For instance, for Cr2AlB2, it correctly predicts the verified precursor pair CrB + Al despite never seeing them in training, a capability absent in prior work. Extensive experiments show that Retro-Rank-In sets a new state-of-the-art, particularly in out-of-distribution generalization and candidate set ranking, offering a powerful tool for accelerating inorganic material synthesis.
Constrained Model-Free Reinforcement Learning for Process Optimization
Nov 16, 2020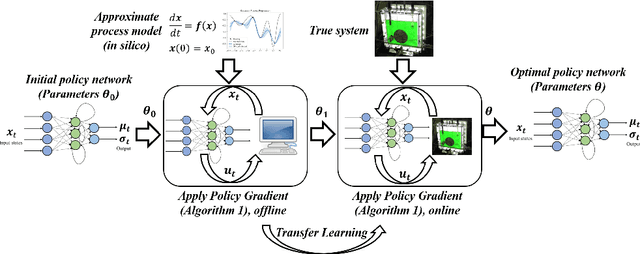

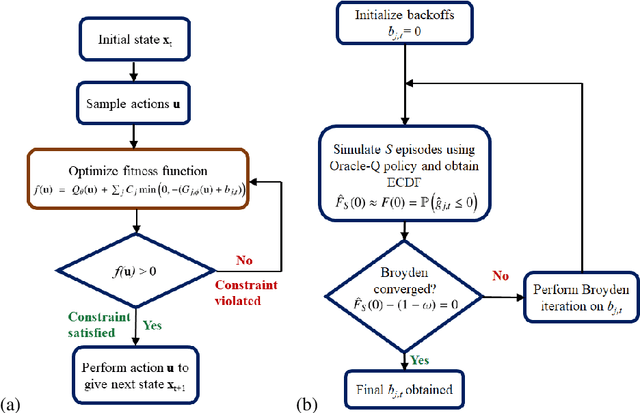

Reinforcement learning (RL) is a control approach that can handle nonlinear stochastic optimal control problems. However, despite the promise exhibited, RL has yet to see marked translation to industrial practice primarily due to its inability to satisfy state constraints. In this work we aim to address this challenge. We propose an 'oracle'-assisted constrained Q-learning algorithm that guarantees the satisfaction of joint chance constraints with a high probability, which is crucial for safety critical tasks. To achieve this, constraint tightening (backoffs) are introduced and adjusted using Broyden's method, hence making them self-tuned. This results in a general methodology that can be imbued into approximate dynamic programming-based algorithms to ensure constraint satisfaction with high probability. Finally, we present case studies that analyze the performance of the proposed approach and compare this algorithm with model predictive control (MPC). The favorable performance of this algorithm signifies a step toward the incorporation of RL into real world optimization and control of engineering systems, where constraints are essential in ensuring safety.