 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstrained Model-Free Reinforcement Learning for Process Optimization
Nov 16, 2020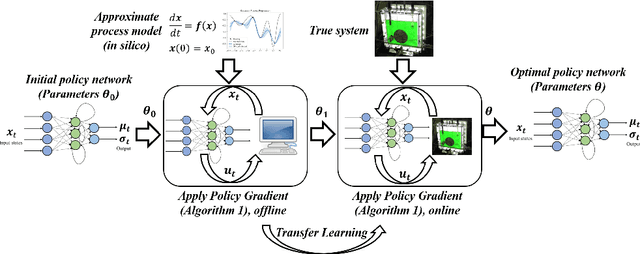

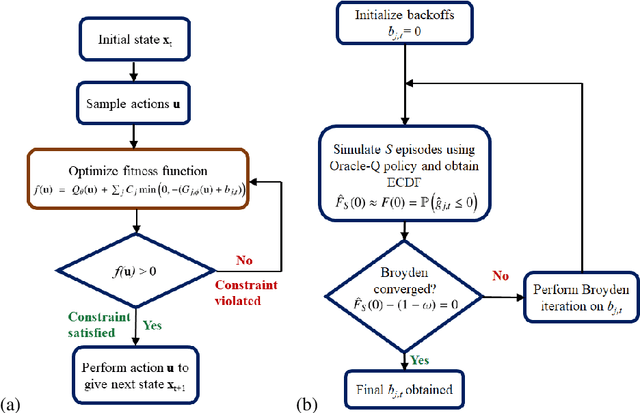

Reinforcement learning (RL) is a control approach that can handle nonlinear stochastic optimal control problems. However, despite the promise exhibited, RL has yet to see marked translation to industrial practice primarily due to its inability to satisfy state constraints. In this work we aim to address this challenge. We propose an 'oracle'-assisted constrained Q-learning algorithm that guarantees the satisfaction of joint chance constraints with a high probability, which is crucial for safety critical tasks. To achieve this, constraint tightening (backoffs) are introduced and adjusted using Broyden's method, hence making them self-tuned. This results in a general methodology that can be imbued into approximate dynamic programming-based algorithms to ensure constraint satisfaction with high probability. Finally, we present case studies that analyze the performance of the proposed approach and compare this algorithm with model predictive control (MPC). The favorable performance of this algorithm signifies a step toward the incorporation of RL into real world optimization and control of engineering systems, where constraints are essential in ensuring safety.