 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterleaving Scheduling and Motion Planning with Incremental Learning of Symbolic Space-Time Motion Abstractions
Mar 11, 2026Task and Motion Planning combines high-level task sequencing (what to do) with low-level motion planning (how to do it) to generate feasible, collision-free execution plans. However, in many real-world domains, such as automated warehouses, tasks are predefined, shifting the challenge to if, when, and how to execute them safely and efficiently under resource, time and motion constraints. In this paper, we formalize this as the Scheduling and Motion Planning problem for multi-object navigation in shared workspaces. We propose a novel solution framework that interleaves off-the-shelf schedulers and motion planners in an incremental learning loop. The scheduler generates candidate plans, while the motion planner checks feasibility and returns symbolic feedback, i.e., spatial conflicts and timing adjustments, to guide the scheduler towards motion-feasible solutions. We validate our proposal on logistics and job-shop scheduling benchmarks augmented with motion tasks, using state-of-the-art schedulers and sampling-based motion planners. Our results show the effectiveness of our framework in generating valid plans under complex temporal and spatial constraints, where synchronized motion is critical.
A Meta-Engine Framework for Interleaved Task and Motion Planning using Topological Refinements
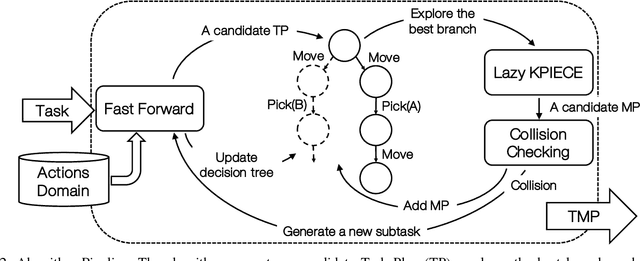
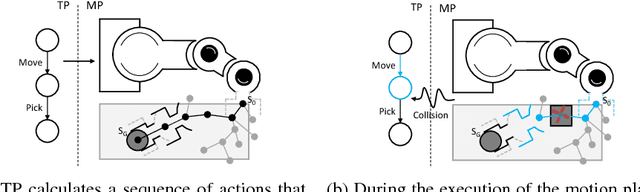
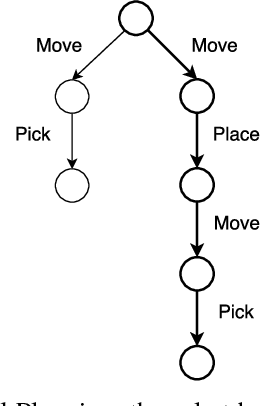
Aug 11, 2024Task And Motion Planning (TAMP) is the problem of finding a solution to an automated planning problem that includes discrete actions executable by low-level continuous motions. This field is gaining increasing interest within the robotics community, as it significantly enhances robot's autonomy in real-world applications. Many solutions and formulations exist, but no clear standard representation has emerged. In this paper, we propose a general and open-source framework for modeling and benchmarking TAMP problems. Moreover, we introduce an innovative meta-technique to solve TAMP problems involving moving agents and multiple task-state-dependent obstacles. This approach enables using any off-the-shelf task planner and motion planner while leveraging a geometric analysis of the motion planner's search space to prune the task planner's exploration, enhancing its efficiency. We also show how to specialize this meta-engine for the case of an incremental SMT-based planner. We demonstrate the effectiveness of our approach across benchmark problems of increasing complexity, where robots must navigate environments with movable obstacles. Finally, we integrate state-of-the-art TAMP algorithms into our framework and compare their performance with our achievements.
Robotic Arm Control and Task Training through Deep Reinforcement Learning
May 06, 2020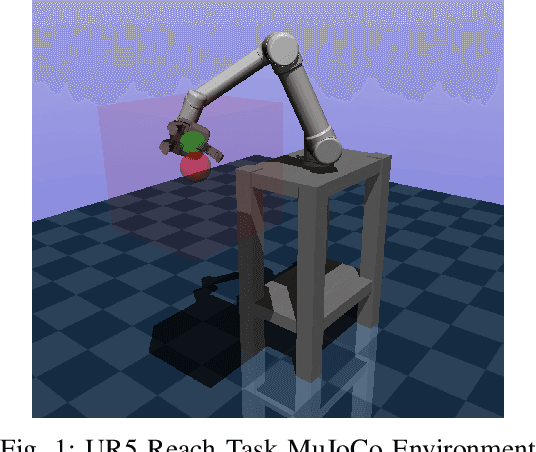
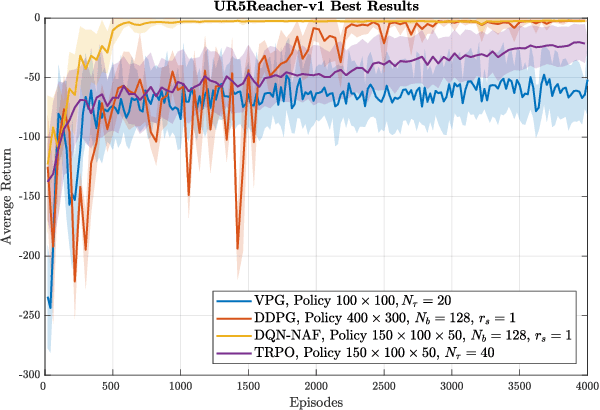
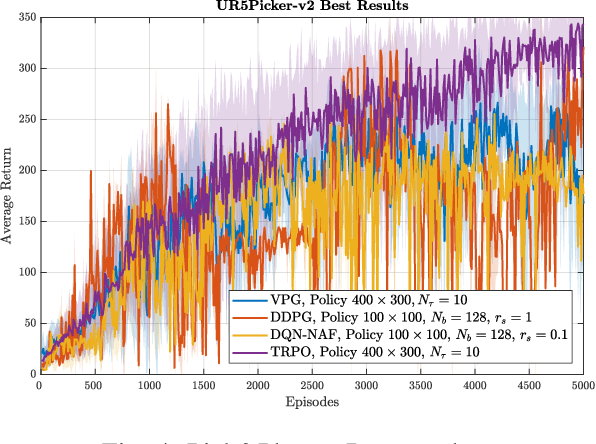
This paper proposes a detailed and extensive comparison of the Trust Region Policy Optimization and DeepQ-Network with Normalized Advantage Functions with respect to other state of the art algorithms, namely Deep Deterministic Policy Gradient and Vanilla Policy Gradient. Comparisons demonstrate that the former have better performances then the latter when asking robotic arms to accomplish manipulation tasks such as reaching a random target pose and pick &placing an object. Both simulated and real-world experiments are provided. Simulation lets us show the procedures that we adopted to precisely estimate the algorithms hyper-parameters and to correctly design good policies. Real-world experiments let show that our polices, if correctly trained on simulation, can be transferred and executed in a real environment with almost no changes.
Conditional Task and Motion Planning through an Effort-based Approach
Apr 18, 2018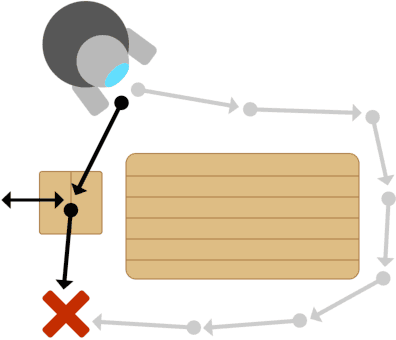
This paper proposes a preliminary work on a Conditional Task and Motion Planning algorithm able to find a plan that minimizes robot efforts while solving assigned tasks. Unlike most of the existing approaches that replan a path only when it becomes unfeasible (e.g., no collision-free paths exist), the proposed algorithm takes into consideration a replanning procedure whenever an effort-saving is possible. The effort is here considered as the execution time, but it is extensible to the robot energy consumption. The computed plan is both conditional and dynamically adaptable to the unexpected environmental changes. Based on the theoretical analysis of the algorithm, authors expect their proposal to be complete and scalable. In progress experiments aim to prove this investigation.
RUR53: an Unmanned Ground Vehicle for Navigation, Recognition and Manipulation
Nov 23, 2017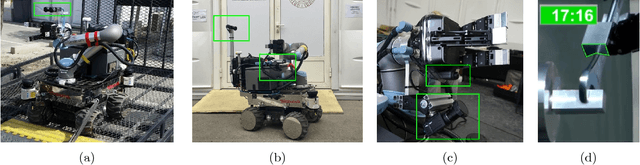
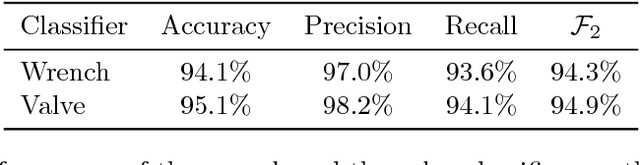
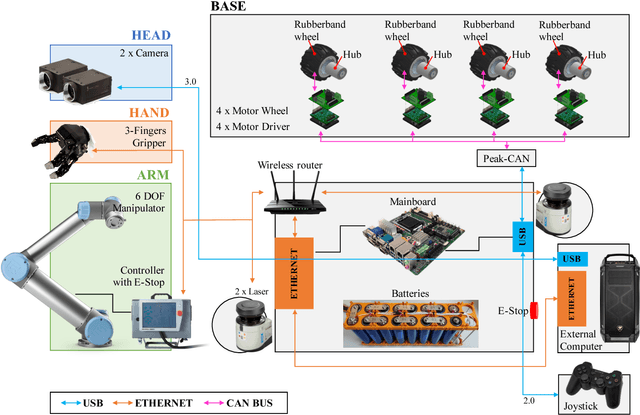

This paper describes RUR53, the unmanned mobile manipulator robot developed by the Desert Lion team of the University of Padova (Italy), and its experience in Challenge 2 and the Grand Challenge of the first Mohamed Bin Zayed International Robotics Challenge (Abu Dhabi, March 2017). According to the competition requirements, the robot is able to freely navigate inside an outdoor arena; locate and reach a panel; recognize and manipulate a wrench; use this wrench to physically operate a valve stem on the panel itself. RUR53 is able to perform these tasks both autonomously and in teleoperation mode. The paper details the adopted hardware and software architectures, focusing on its key aspects: modularity, generality, and the ability of exploiting sensor feedback. These features let the team rank third in the Gran Challenge in collaboration with the Czech Technical University in Prague, Czech Republic, the University of Pennsylvania, USA, and the University of Lincoln, UK. Tests performed both in the Challenge arena and in the lab are presented and discussed, focusing on the strengths and limitations of the proposed wrench and valve classification and recognition algorithms. Lessons learned are also detailed.