 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRUR53: an Unmanned Ground Vehicle for Navigation, Recognition and Manipulation
Paper and Code
Nov 23, 2017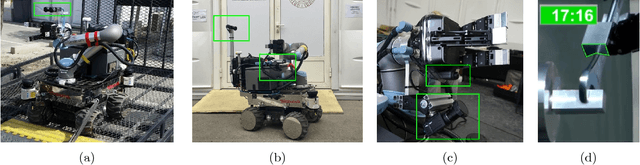
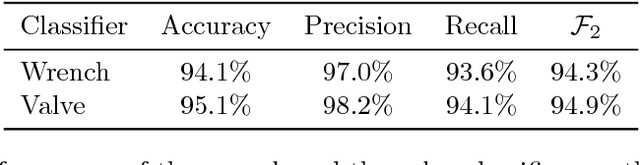
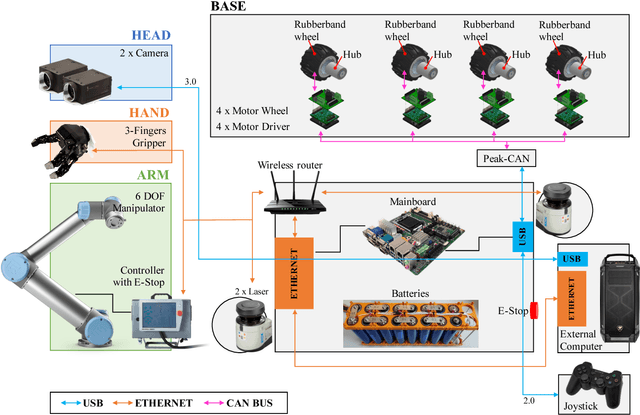

This paper describes RUR53, the unmanned mobile manipulator robot developed by the Desert Lion team of the University of Padova (Italy), and its experience in Challenge 2 and the Grand Challenge of the first Mohamed Bin Zayed International Robotics Challenge (Abu Dhabi, March 2017). According to the competition requirements, the robot is able to freely navigate inside an outdoor arena; locate and reach a panel; recognize and manipulate a wrench; use this wrench to physically operate a valve stem on the panel itself. RUR53 is able to perform these tasks both autonomously and in teleoperation mode. The paper details the adopted hardware and software architectures, focusing on its key aspects: modularity, generality, and the ability of exploiting sensor feedback. These features let the team rank third in the Gran Challenge in collaboration with the Czech Technical University in Prague, Czech Republic, the University of Pennsylvania, USA, and the University of Lincoln, UK. Tests performed both in the Challenge arena and in the lab are presented and discussed, focusing on the strengths and limitations of the proposed wrench and valve classification and recognition algorithms. Lessons learned are also detailed.