 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMachine-Learned Premise Selection for Lean
Mar 17, 2023



We introduce a machine-learning-based tool for the Lean proof assistant that suggests relevant premises for theorems being proved by a user. The design principles for the tool are (1) tight integration with the proof assistant, (2) ease of use and installation, (3) a lightweight and fast approach. For this purpose, we designed a custom version of the random forest model, trained in an online fashion. It is implemented directly in Lean, which was possible thanks to the rich and efficient metaprogramming features of Lean 4. The random forest is trained on data extracted from mathlib -- Lean's mathematics library. We experiment with various options for producing training features and labels. The advice from a trained model is accessible to the user via the suggest_premises tactic which can be called in an editor while constructing a proof interactively.
Query-based Hard-Image Retrieval for Object Detection at Test Time
Sep 23, 2022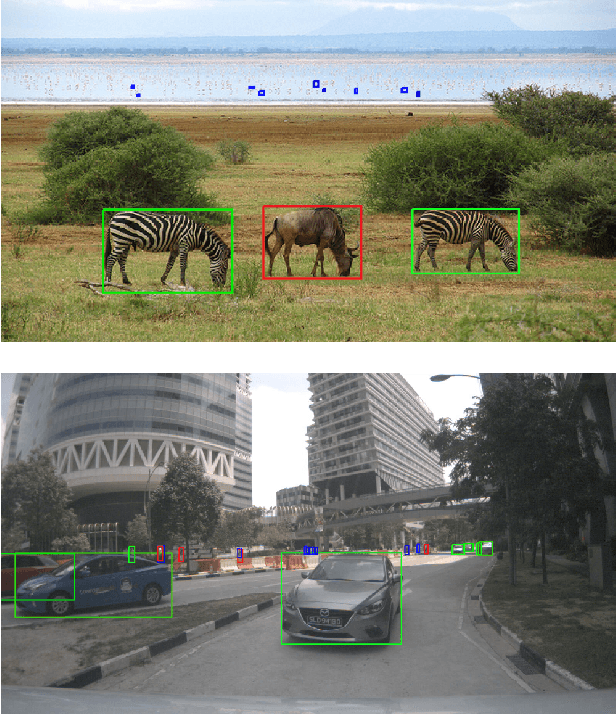
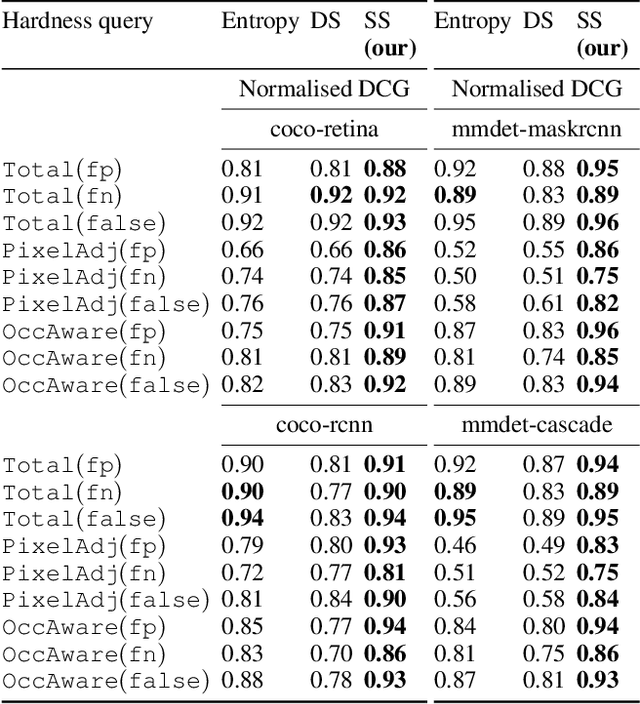
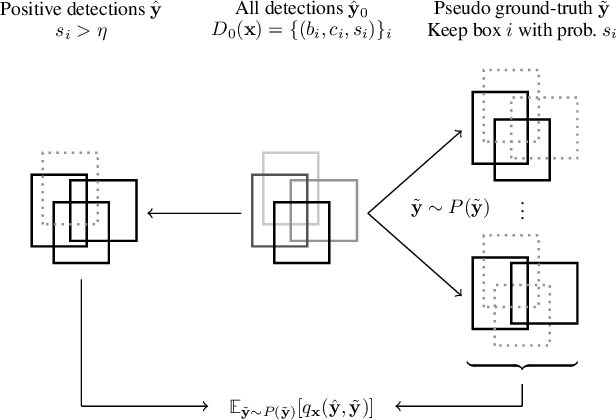
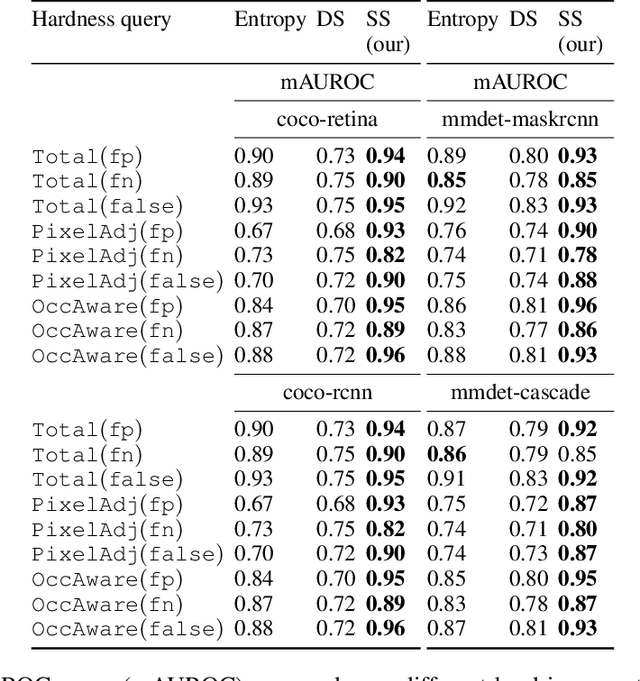
There is a longstanding interest in capturing the error behaviour of object detectors by finding images where their performance is likely to be unsatisfactory. In real-world applications such as autonomous driving, it is also crucial to characterise potential failures beyond simple requirements of detection performance. For example, a missed detection of a pedestrian close to an ego vehicle will generally require closer inspection than a missed detection of a car in the distance. The problem of predicting such potential failures at test time has largely been overlooked in the literature and conventional approaches based on detection uncertainty fall short in that they are agnostic to such fine-grained characterisation of errors. In this work, we propose to reformulate the problem of finding "hard" images as a query-based hard image retrieval task, where queries are specific definitions of "hardness", and offer a simple and intuitive method that can solve this task for a large family of queries. Our method is entirely post-hoc, does not require ground-truth annotations, is independent of the choice of a detector, and relies on an efficient Monte Carlo estimation that uses a simple stochastic model in place of the ground-truth. We show experimentally that it can be applied successfully to a wide variety of queries for which it can reliably identify hard images for a given detector without any labelled data. We provide results on ranking and classification tasks using the widely used RetinaNet, Faster-RCNN, Mask-RCNN, and Cascade Mask-RCNN object detectors.
PaRoT: A Practical Framework for Robust Deep Neural Network Training
Jan 08, 2020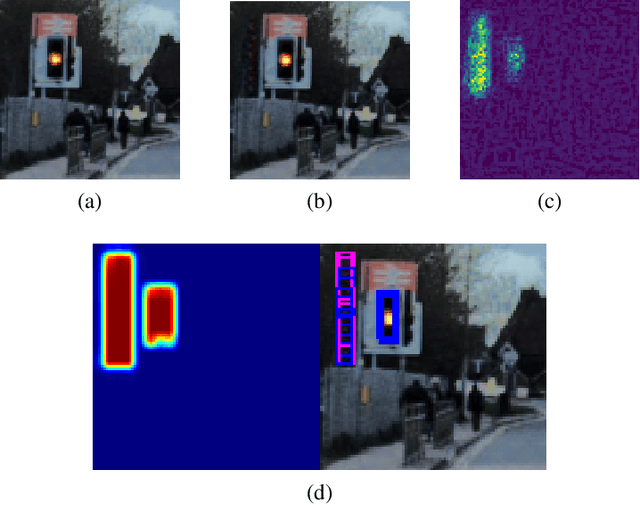
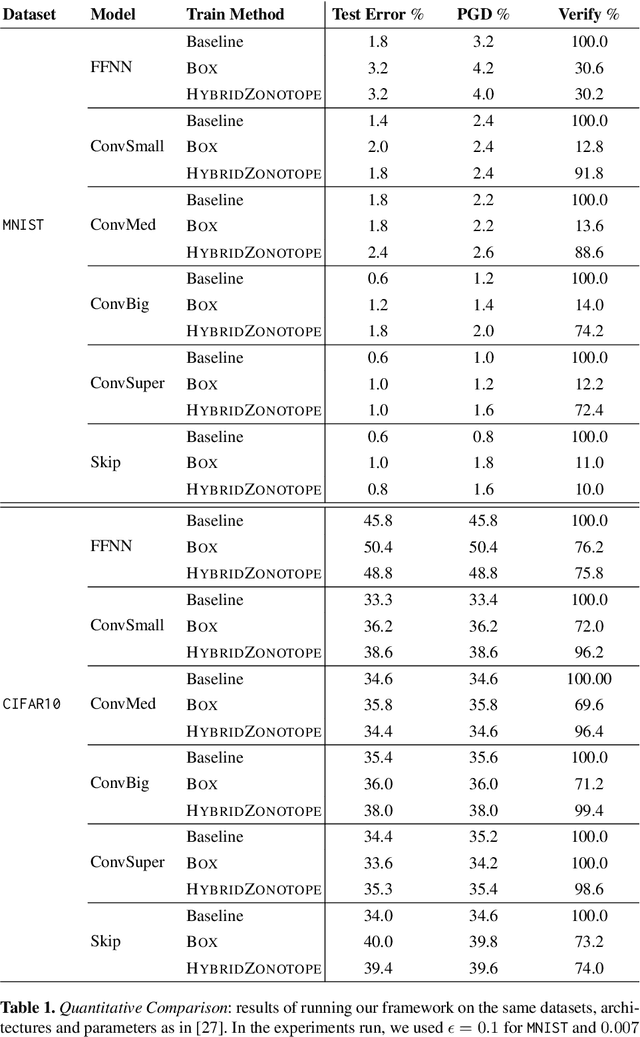


Deep Neural Networks (DNNs) are finding important applications in safety-critical systems such as Autonomous Vehicles (AVs), where perceiving the environment correctly and robustly is necessary for safe operation. Raising unique challenges for assurance due to their black-box nature, DNNs pose a fundamental problem for regulatory acceptance of these types of systems. Robust training --- training to minimize excessive sensitivity to small changes in input --- has emerged as one promising technique to address this challenge. However, existing robust training tools are inconvenient to use or apply to existing codebases and models: they typically only support a small subset of model elements and require users to extensively rewrite the training code. In this paper we introduce a novel framework, PaRoT, developed on the popular TensorFlow platform, that greatly reduces the barrier to entry. Our framework enables robust training to be performed on arbitrary DNNs without any rewrites to the model. We demonstrate that our framework's performance is comparable to prior art, and exemplify its ease of use on off-the-shelf, trained models and on a real-world industrial application: training a robust traffic light detection network.