 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePaRoT: A Practical Framework for Robust Deep Neural Network Training
Paper and Code
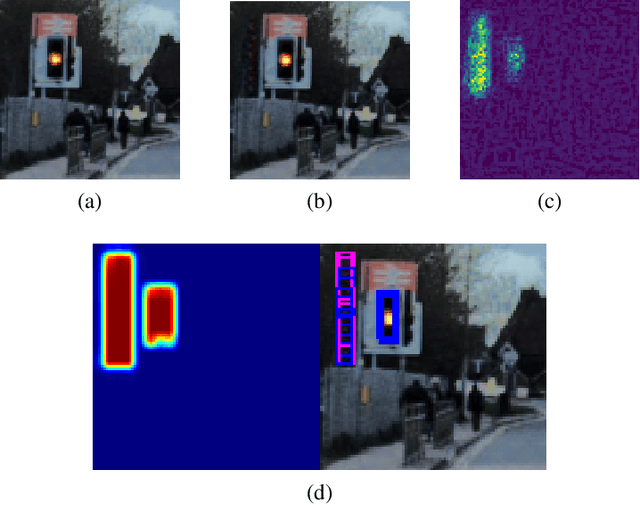
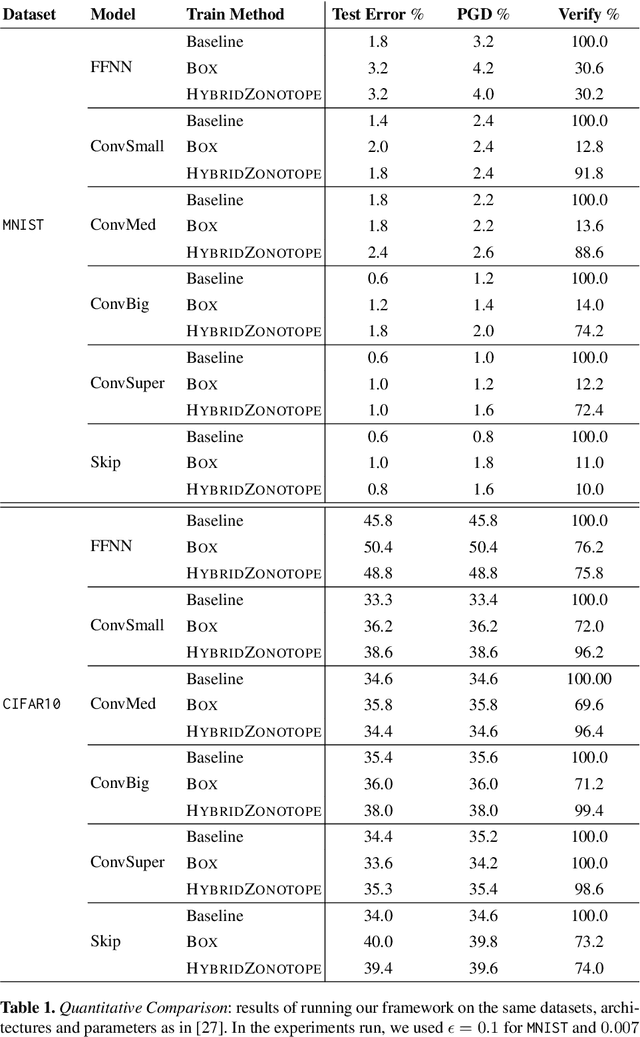


Deep Neural Networks (DNNs) are finding important applications in safety-critical systems such as Autonomous Vehicles (AVs), where perceiving the environment correctly and robustly is necessary for safe operation. Raising unique challenges for assurance due to their black-box nature, DNNs pose a fundamental problem for regulatory acceptance of these types of systems. Robust training --- training to minimize excessive sensitivity to small changes in input --- has emerged as one promising technique to address this challenge. However, existing robust training tools are inconvenient to use or apply to existing codebases and models: they typically only support a small subset of model elements and require users to extensively rewrite the training code. In this paper we introduce a novel framework, PaRoT, developed on the popular TensorFlow platform, that greatly reduces the barrier to entry. Our framework enables robust training to be performed on arbitrary DNNs without any rewrites to the model. We demonstrate that our framework's performance is comparable to prior art, and exemplify its ease of use on off-the-shelf, trained models and on a real-world industrial application: training a robust traffic light detection network.