 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmartphone region-wise image indoor localization using deep learning for indoor tourist attraction
Mar 12, 2024



Smart indoor tourist attractions, such as smart museums and aquariums, usually require a significant investment in indoor localization devices. The smartphone Global Positional Systems use is unsuitable for scenarios where dense materials such as concrete and metal block weaken the GPS signals, which is the most common scenario in an indoor tourist attraction. Deep learning makes it possible to perform region-wise indoor localization using smartphone images. This approach does not require any investment in infrastructure, reducing the cost and time to turn museums and aquariums into smart museums or smart aquariums. This paper proposes using deep learning algorithms to classify locations using smartphone camera images for indoor tourism attractions. We evaluate our proposal in a real-world scenario in Brazil. We extensively collect images from ten different smartphones to classify biome-themed fish tanks inside the Pantanal Biopark, creating a new dataset of 3654 images. We tested seven state-of-the-art neural networks, three being transformer-based, achieving precision around 90% on average and recall and f-score around 89% on average. The results indicate good feasibility of the proposal in a most indoor tourist attractions.
Counting and Locating High-Density Objects Using Convolutional Neural Network
Feb 08, 2021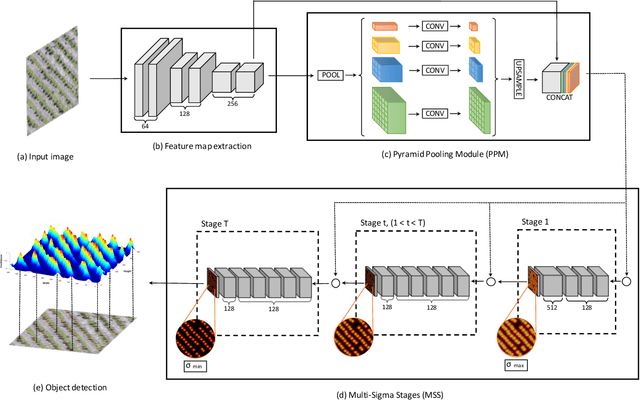
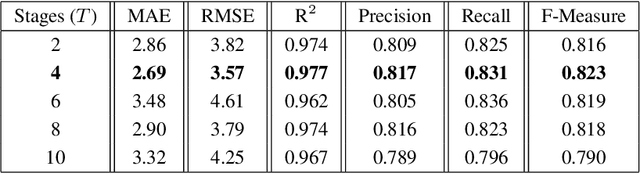
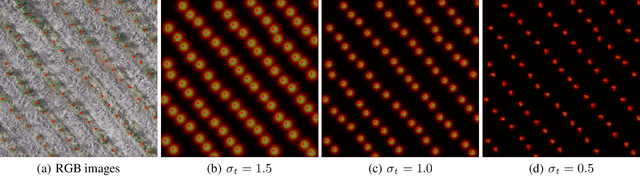

This paper presents a Convolutional Neural Network (CNN) approach for counting and locating objects in high-density imagery. To the best of our knowledge, this is the first object counting and locating method based on a feature map enhancement and a Multi-Stage Refinement of the confidence map. The proposed method was evaluated in two counting datasets: tree and car. For the tree dataset, our method returned a mean absolute error (MAE) of 2.05, a root-mean-squared error (RMSE) of 2.87 and a coefficient of determination (R$^2$) of 0.986. For the car dataset (CARPK and PUCPR+), our method was superior to state-of-the-art methods. In the these datasets, our approach achieved an MAE of 4.45 and 3.16, an RMSE of 6.18 and 4.39, and an R$^2$ of 0.975 and 0.999, respectively. The proposed method is suitable for dealing with high object-density, returning a state-of-the-art performance for counting and locating objects.
A Review on Deep Learning in UAV Remote Sensing
Jan 29, 2021

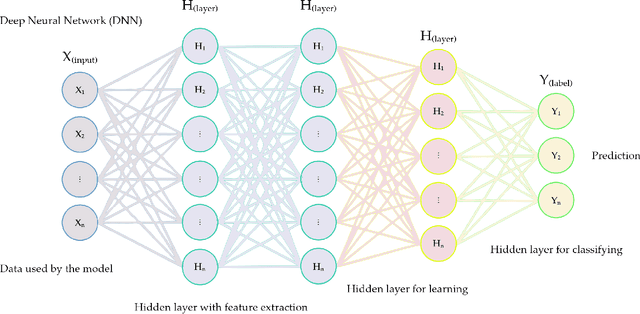
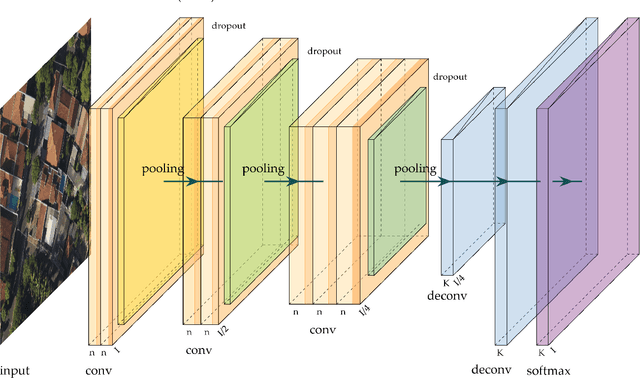
Deep Neural Networks (DNNs) learn representation from data with an impressive capability, and brought important breakthroughs for processing images, time-series, natural language, audio, video, and many others. In the remote sensing field, surveys and literature revisions specifically involving DNNs algorithms' applications have been conducted in an attempt to summarize the amount of information produced in its subfields. Recently, Unmanned Aerial Vehicles (UAV) based applications have dominated aerial sensing research. However, a literature revision that combines both "deep learning" and "UAV remote sensing" thematics has not yet been conducted. The motivation for our work was to present a comprehensive review of the fundamentals of Deep Learning (DL) applied in UAV-based imagery. We focused mainly on describing classification and regression techniques used in recent applications with UAV-acquired data. For that, a total of 232 papers published in international scientific journal databases was examined. We gathered the published material and evaluated their characteristics regarding application, sensor, and technique used. We relate how DL presents promising results and has the potential for processing tasks associated with UAV-based image data. Lastly, we project future perspectives, commentating on prominent DL paths to be explored in the UAV remote sensing field. Our revision consists of a friendly-approach to introduce, commentate, and summarize the state-of-the-art in UAV-based image applications with DNNs algorithms in diverse subfields of remote sensing, grouping it in the environmental, urban, and agricultural contexts.