 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Review on Deep Learning in UAV Remote Sensing
Jan 29, 2021

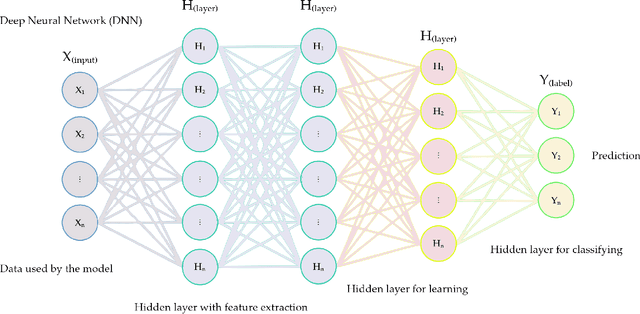
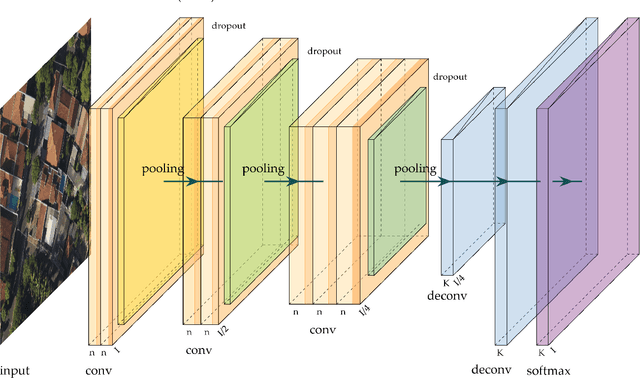
Deep Neural Networks (DNNs) learn representation from data with an impressive capability, and brought important breakthroughs for processing images, time-series, natural language, audio, video, and many others. In the remote sensing field, surveys and literature revisions specifically involving DNNs algorithms' applications have been conducted in an attempt to summarize the amount of information produced in its subfields. Recently, Unmanned Aerial Vehicles (UAV) based applications have dominated aerial sensing research. However, a literature revision that combines both "deep learning" and "UAV remote sensing" thematics has not yet been conducted. The motivation for our work was to present a comprehensive review of the fundamentals of Deep Learning (DL) applied in UAV-based imagery. We focused mainly on describing classification and regression techniques used in recent applications with UAV-acquired data. For that, a total of 232 papers published in international scientific journal databases was examined. We gathered the published material and evaluated their characteristics regarding application, sensor, and technique used. We relate how DL presents promising results and has the potential for processing tasks associated with UAV-based image data. Lastly, we project future perspectives, commentating on prominent DL paths to be explored in the UAV remote sensing field. Our revision consists of a friendly-approach to introduce, commentate, and summarize the state-of-the-art in UAV-based image applications with DNNs algorithms in diverse subfields of remote sensing, grouping it in the environmental, urban, and agricultural contexts.
A CNN Approach to Simultaneously Count Plants and Detect Plantation-Rows from UAV Imagery
Jan 02, 2021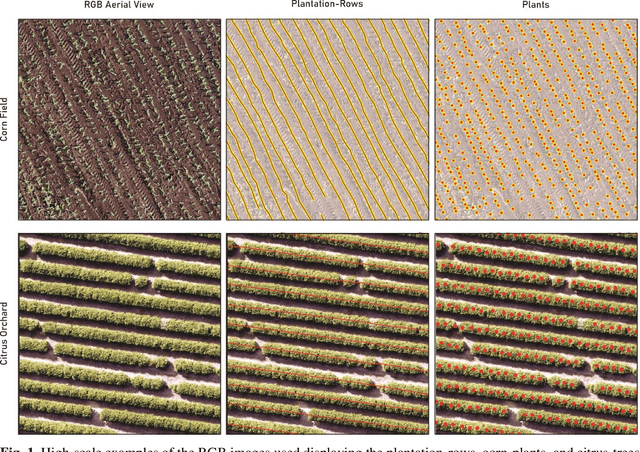
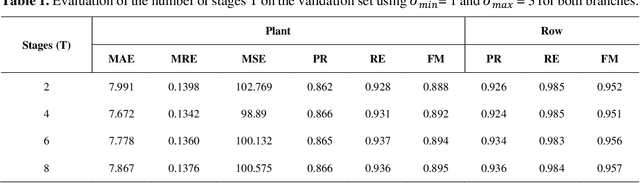
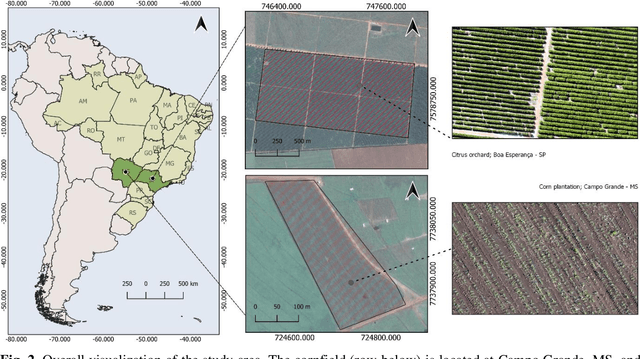
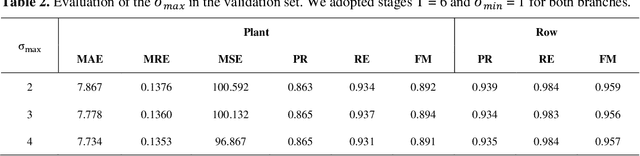
In this paper, we propose a novel deep learning method based on a Convolutional Neural Network (CNN) that simultaneously detects and geolocates plantation-rows while counting its plants considering highly-dense plantation configurations. The experimental setup was evaluated in a cornfield with different growth stages and in a Citrus orchard. Both datasets characterize different plant density scenarios, locations, types of crops, sensors, and dates. A two-branch architecture was implemented in our CNN method, where the information obtained within the plantation-row is updated into the plant detection branch and retro-feed to the row branch; which are then refined by a Multi-Stage Refinement method. In the corn plantation datasets (with both growth phases, young and mature), our approach returned a mean absolute error (MAE) of 6.224 plants per image patch, a mean relative error (MRE) of 0.1038, precision and recall values of 0.856, and 0.905, respectively, and an F-measure equal to 0.876. These results were superior to the results from other deep networks (HRNet, Faster R-CNN, and RetinaNet) evaluated with the same task and dataset. For the plantation-row detection, our approach returned precision, recall, and F-measure scores of 0.913, 0.941, and 0.925, respectively. To test the robustness of our model with a different type of agriculture, we performed the same task in the citrus orchard dataset. It returned an MAE equal to 1.409 citrus-trees per patch, MRE of 0.0615, precision of 0.922, recall of 0.911, and F-measure of 0.965. For citrus plantation-row detection, our approach resulted in precision, recall, and F-measure scores equal to 0.965, 0.970, and 0.964, respectively. The proposed method achieved state-of-the-art performance for counting and geolocating plants and plant-rows in UAV images from different types of crops.