 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning under periodic observations: bounds and bounding-based solutions
Aug 05, 2022We study planning problems faced by robots operating in uncertain environments with incomplete knowledge of state, and actions that are noisy and/or imprecise. This paper identifies a new problem sub-class that models settings in which information is revealed only intermittently through some exogenous process that provides state information periodically. Several practical domains fit this model, including the specific scenario that motivates our research: autonomous navigation of a planetary exploration rover augmented by remote imaging. With an eye to efficient specialized solution methods, we examine the structure of instances of this sub-class. They lead to Markov Decision Processes with exponentially large action-spaces but for which, as those actions comprise sequences of more atomic elements, one may establish performance bounds by comparing policies under different information assumptions. This provides a way in which to construct performance bounds systematically. Such bounds are useful because, in conjunction with the insights they confer, they can be employed in bounding-based methods to obtain high-quality solutions efficiently; the empirical results we present demonstrate their effectiveness for the considered problems. The foregoing has also alluded to the distinctive role that time plays for these problems -- more specifically: time until information is revealed -- and we uncover and discuss several interesting subtleties in this regard.
Non-Uniform Robot Densities in Vibration Driven Swarms Using Phase Separation Theory
Mar 02, 2019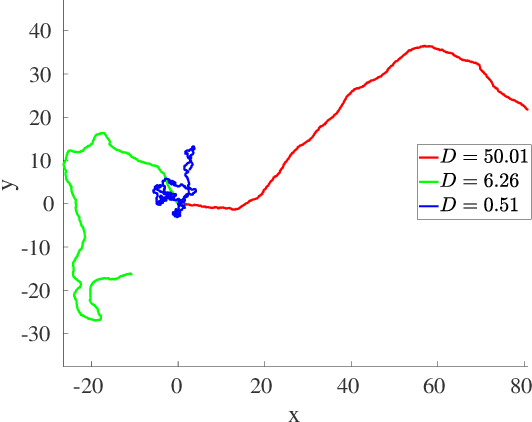
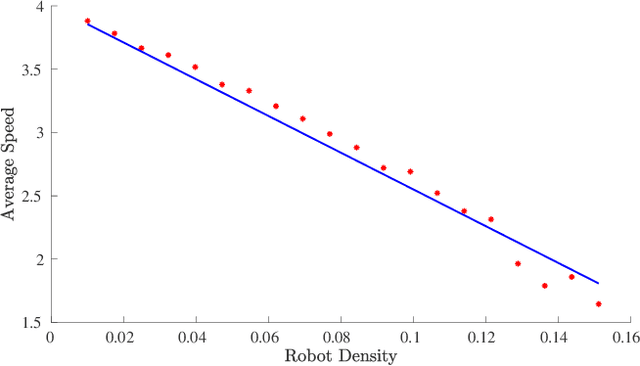
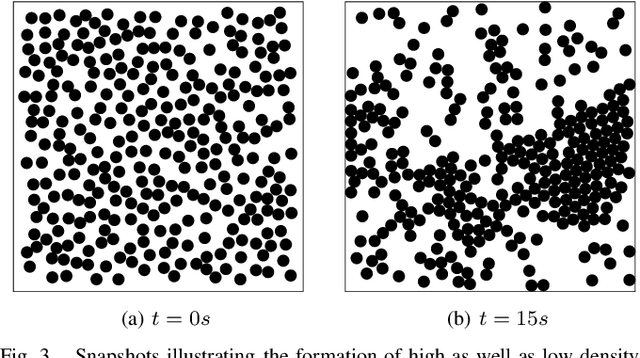
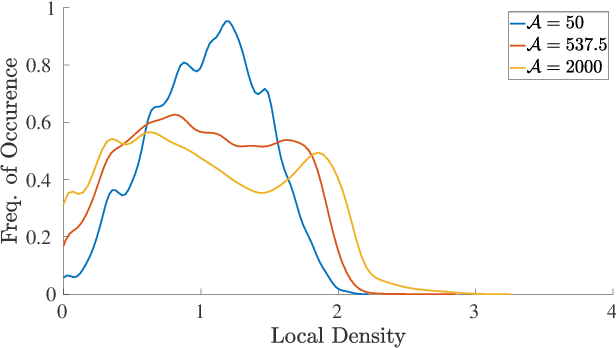
In robot swarms operating under highly restrictive sensing and communication constraints, individuals may need to use direct physical proximity to facilitate information exchange. However, in certain task-related scenarios, this requirement might conflict with the need for robots to spread out in the environment, e.g., for distributed sensing or surveillance applications. This paper demonstrates how a swarm of minimally-equipped robots can form high-density robot aggregates which coexist with lower robot densities in the domain. We envision a scenario where a swarm of vibration-driven robots---which sit atop bristles and achieve directed motion by vibrating them---move somewhat randomly in an environment while colliding with each other. Theoretical techniques from the study of far-from-equilibrium collectives and statistical mechanics clarify the mechanisms underlying the formation of these high and low density regions. Specifically, we capitalize on a transformation that connects the collective properties of a system of self-propelled particles with that of a well-studied molecular fluid system, thereby inheriting the rich theory of equilibrium thermodynamics. This connection is a formal one and is a relatively recent result in studies of motility induced phase separation; it is previously unexplored in the context of robotics. Real robot experiments as well as simulations illustrate how inter-robot collisions can precipitate the formation of non-uniform robot densities in a closed and bounded region.
Decentralized State Estimation via a Hybrid of Consensus and Covariance intersection
Mar 03, 2016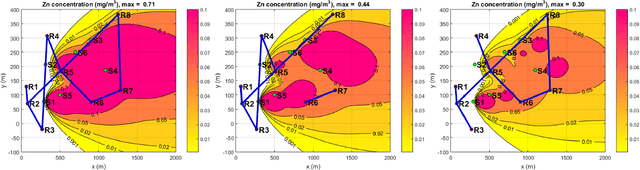
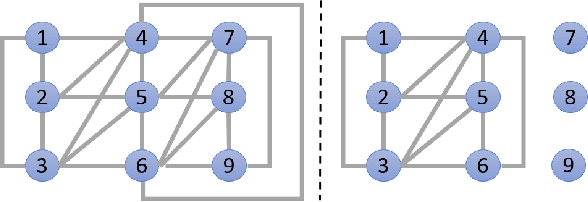
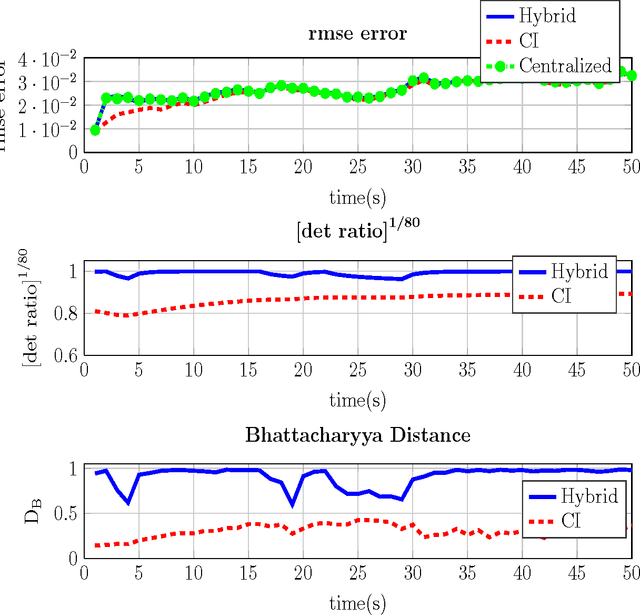
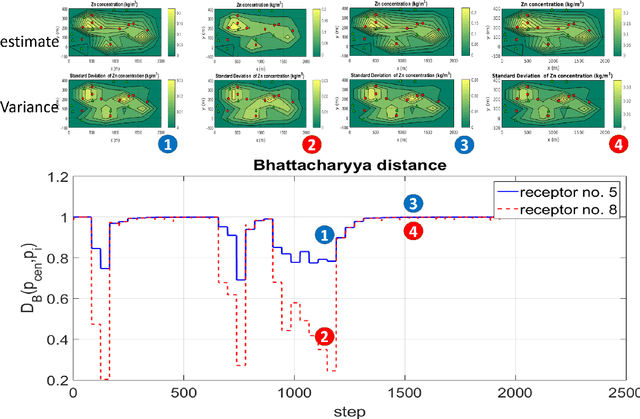
This paper presents a new recursive information consensus filter for decentralized dynamic-state estimation. No structure is assumed about the topology of the network and local estimators are assumed to have access only to local information. The network need not be connected at all times. Consensus over priors which might become correlated is performed through Covariance Intersection (CI) and consensus over new information is handled using weights based on a Metropolis Hastings Markov Chains. We establish bounds for estimation performance and show that our method produces unbiased conservative estimates that are better than CI. The performance of the proposed method is evaluated and compared with competing algorithms on an atmospheric dispersion problem.