 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized State Estimation via a Hybrid of Consensus and Covariance intersection
Paper and Code
Mar 03, 2016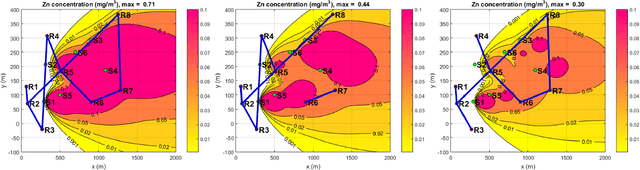
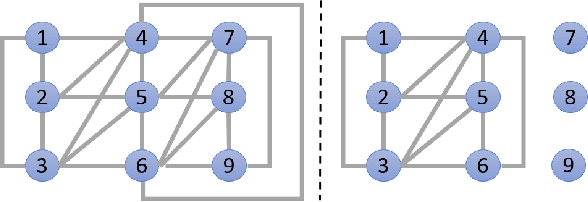
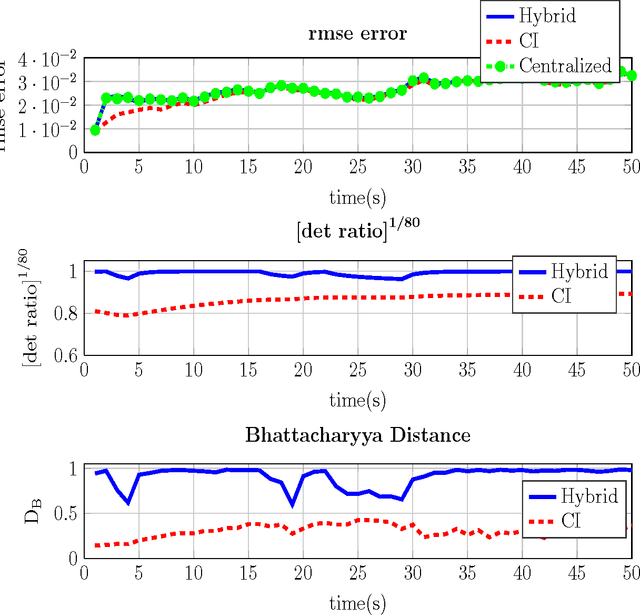
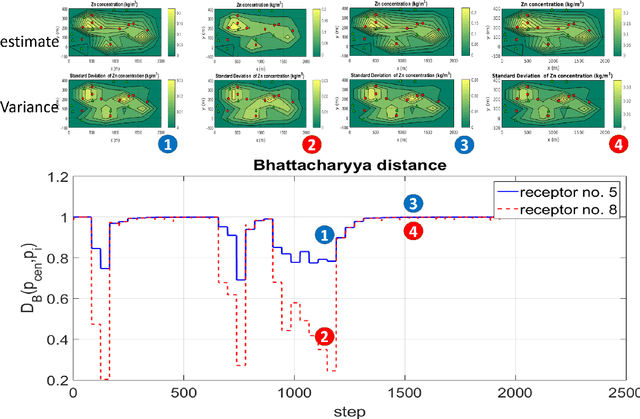
This paper presents a new recursive information consensus filter for decentralized dynamic-state estimation. No structure is assumed about the topology of the network and local estimators are assumed to have access only to local information. The network need not be connected at all times. Consensus over priors which might become correlated is performed through Covariance Intersection (CI) and consensus over new information is handled using weights based on a Metropolis Hastings Markov Chains. We establish bounds for estimation performance and show that our method produces unbiased conservative estimates that are better than CI. The performance of the proposed method is evaluated and compared with competing algorithms on an atmospheric dispersion problem.