 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-Uniform Robot Densities in Vibration Driven Swarms Using Phase Separation Theory
Paper and Code
Mar 02, 2019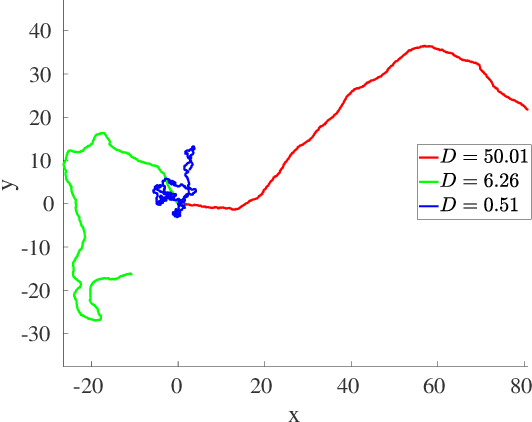
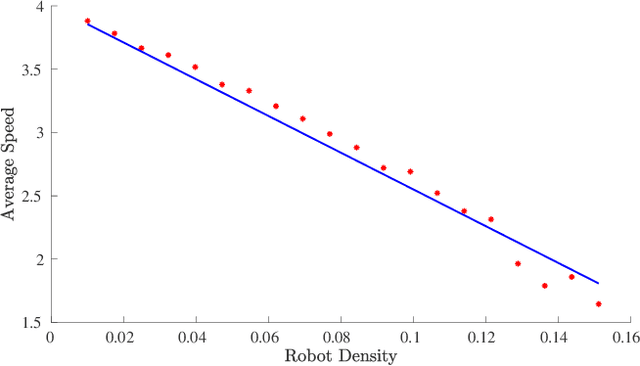
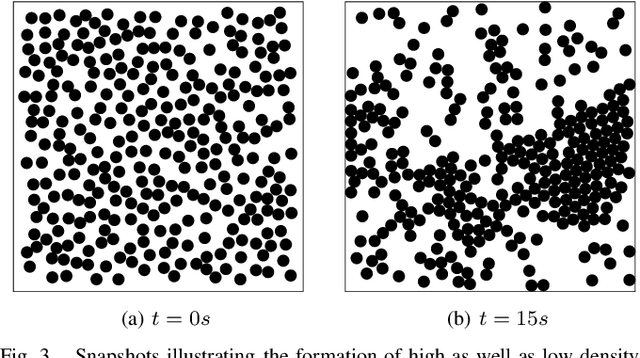
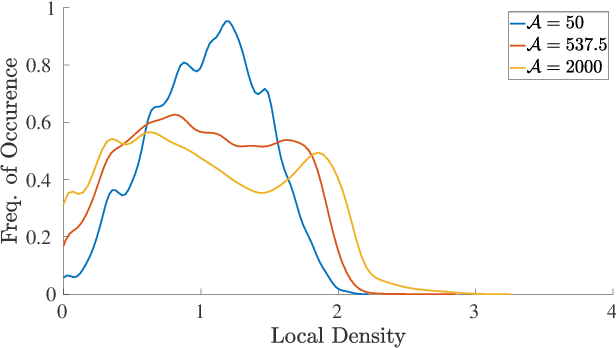
In robot swarms operating under highly restrictive sensing and communication constraints, individuals may need to use direct physical proximity to facilitate information exchange. However, in certain task-related scenarios, this requirement might conflict with the need for robots to spread out in the environment, e.g., for distributed sensing or surveillance applications. This paper demonstrates how a swarm of minimally-equipped robots can form high-density robot aggregates which coexist with lower robot densities in the domain. We envision a scenario where a swarm of vibration-driven robots---which sit atop bristles and achieve directed motion by vibrating them---move somewhat randomly in an environment while colliding with each other. Theoretical techniques from the study of far-from-equilibrium collectives and statistical mechanics clarify the mechanisms underlying the formation of these high and low density regions. Specifically, we capitalize on a transformation that connects the collective properties of a system of self-propelled particles with that of a well-studied molecular fluid system, thereby inheriting the rich theory of equilibrium thermodynamics. This connection is a formal one and is a relatively recent result in studies of motility induced phase separation; it is previously unexplored in the context of robotics. Real robot experiments as well as simulations illustrate how inter-robot collisions can precipitate the formation of non-uniform robot densities in a closed and bounded region.