 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRFNet-4D: Joint Object Reconstruction and Flow Estimation from 4D Point Clouds
Mar 30, 2022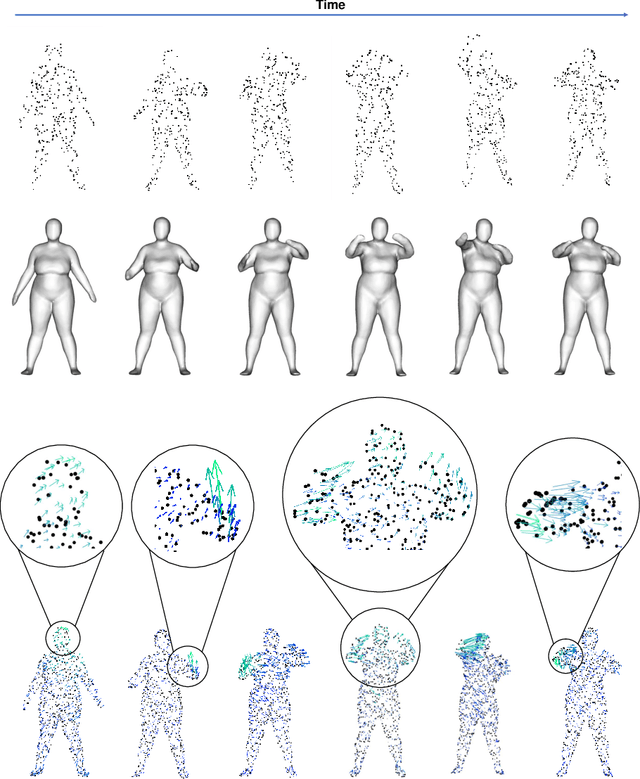
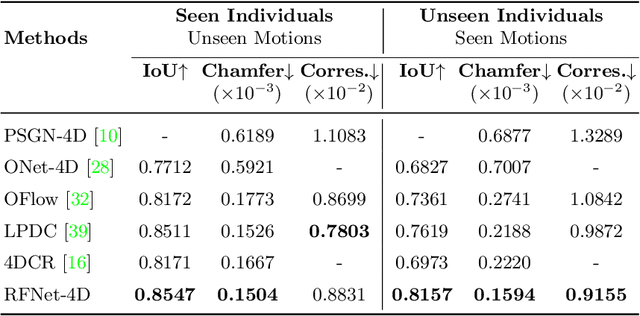
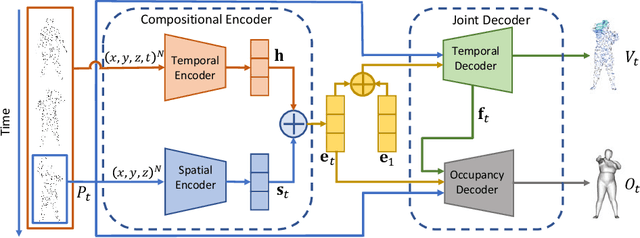
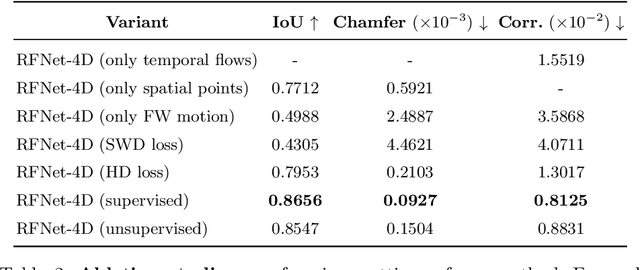
Object reconstruction from 3D point clouds has achieved impressive progress in the computer vision and computer graphics research field. However, reconstruction from time-varying point clouds (a.k.a. 4D point clouds) is generally overlooked. In this paper, we propose a new network architecture, namely RFNet-4D, that jointly reconstructs objects and their motion flows from 4D point clouds. The key insight is that simultaneously performing both tasks via learning spatial and temporal features from a sequence of point clouds can leverage individual tasks and lead to improved overall performance. The proposed network can be trained using both supervised and unsupervised learning. To prove this ability, we design a temporal vector field learning module using an unsupervised learning approach for flow estimation, leveraged by supervised learning of spatial structures for object reconstruction. Extensive experiments and analyses on benchmark dataset validated the effectiveness and efficiency of our method. As shown in experimental results, our method achieves state-of-the-art performance on both flow estimation and object reconstruction while performing much faster than existing methods in both training and inference.
Binary Hashing with Semidefinite Relaxation and Augmented Lagrangian
Jul 19, 2016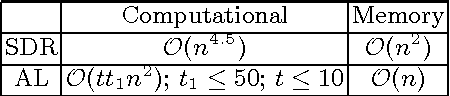
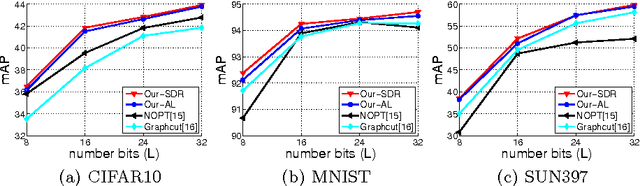

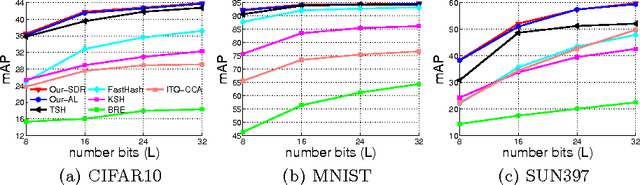
This paper proposes two approaches for inferencing binary codes in two-step (supervised, unsupervised) hashing. We first introduce an unified formulation for both supervised and unsupervised hashing. Then, we cast the learning of one bit as a Binary Quadratic Problem (BQP). We propose two approaches to solve BQP. In the first approach, we relax BQP as a semidefinite programming problem which its global optimum can be achieved. We theoretically prove that the objective value of the binary solution achieved by this approach is well bounded. In the second approach, we propose an augmented Lagrangian based approach to solve BQP directly without relaxing the binary constraint. Experimental results on three benchmark datasets show that our proposed methods compare favorably with the state of the art.