 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoordinated Control of Path Tracking and Yaw Stability for Distributed Drive Electric Vehicle Based on AMPC and DYC
Apr 24, 2023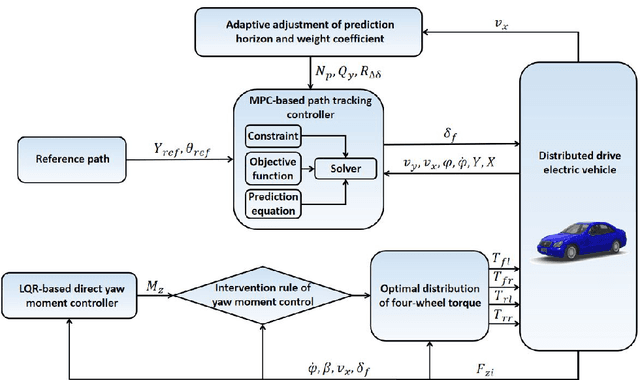

Maintaining both path-tracking accuracy and yaw stability of distributed drive electric vehicles (DDEVs) under various driving conditions presents a significant challenge in the field of vehicle control. To address this limitation, a coordinated control strategy that integrates adaptive model predictive control (AMPC) path-tracking control and direct yaw moment control (DYC) is proposed for DDEVs. The proposed strategy, inspired by a hierarchical framework, is coordinated by the upper layer of path-tracking control and the lower layer of direct yaw moment control. Based on the linear time-varying model predictive control (LTV MPC) algorithm, the effects of prediction horizon and weight coefficients on the path-tracking accuracy and yaw stability of the vehicle are compared and analyzed first. According to the aforementioned analysis, an AMPC path-tracking controller with variable prediction horizon and weight coefficients is designed considering the vehicle speed's variation in the upper layer. The lower layer involves DYC based on the linear quadratic regulator (LQR) technique. Specifically, the intervention rule of DYC is determined by the threshold of the yaw rate error and the phase diagram of the sideslip angle. Extensive simulation experiments are conducted to evaluate the proposed coordinated control strategy under different driving conditions. The results show that, under variable speed and low adhesion conditions, the vehicle's yaw stability and path-tracking accuracy have been improved by 21.58\% and 14.43\%, respectively, compared to AMPC. Similarly, under high speed and low adhesion conditions, the vehicle's yaw stability and path-tracking accuracy have been improved by 44.30\% and 14.25\%, respectively, compared to the coordination of LTV MPC and DYC. The results indicate that the proposed adaptive path-tracking controller is effective across different speeds.
Futuristic Variations and Analysis in Fundus Images Corresponding to Biological Traits
Feb 08, 2023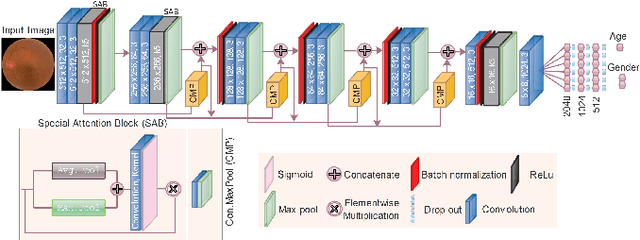
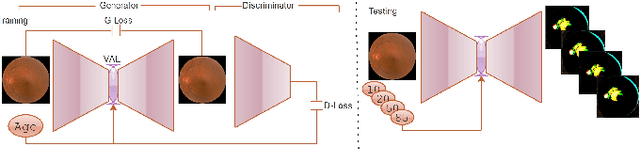
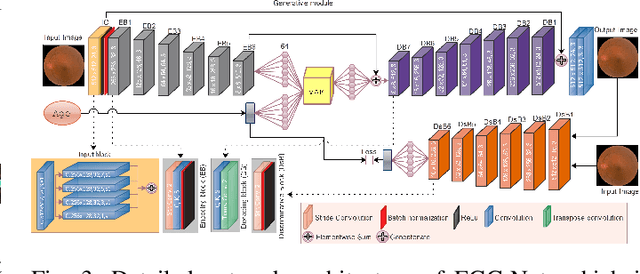
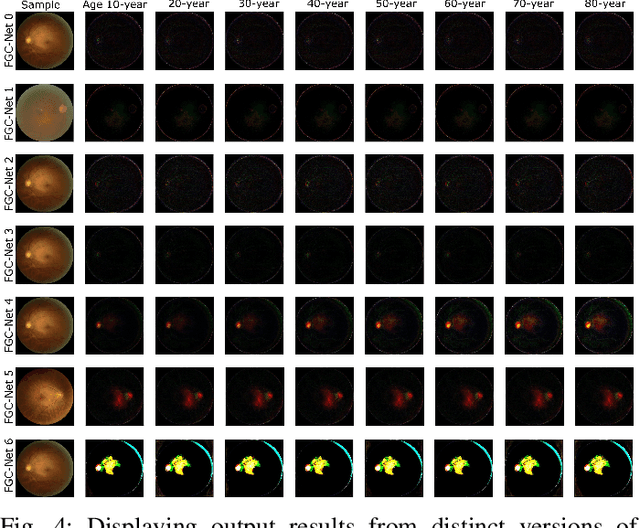
Fundus image captures rear of an eye, and which has been studied for the diseases identification, classification, segmentation, generation, and biological traits association using handcrafted, conventional, and deep learning methods. In biological traits estimation, most of the studies have been carried out for the age prediction and gender classification with convincing results. However, the current study utilizes the cutting-edge deep learning (DL) algorithms to estimate biological traits in terms of age and gender together with associating traits to retinal visuals. For the traits association, our study embeds aging as the label information into the proposed DL model to learn knowledge about the effected regions with aging. Our proposed DL models, named FAG-Net and FGC-Net, correspondingly estimate biological traits (age and gender) and generates fundus images. FAG-Net can generate multiple variants of an input fundus image given a list of ages as conditions. Our study analyzes fundus images and their corresponding association with biological traits, and predicts of possible spreading of ocular disease on fundus images given age as condition to the generative model. Our proposed models outperform the randomly selected state of-the-art DL models.