 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShape and Style GAN-based Multispectral Data Augmentation for Crop/Weed Segmentation in Precision Farming
Jul 19, 2024The use of deep learning methods for precision farming is gaining increasing interest. However, collecting training data in this application field is particularly challenging and costly due to the need of acquiring information during the different growing stages of the cultivation of interest. In this paper, we present a method for data augmentation that uses two GANs to create artificial images to augment the training data. To obtain a higher image quality, instead of re-creating the entire scene, we take original images and replace only the patches containing objects of interest with artificial ones containing new objects with different shapes and styles. In doing this, we take into account both the foreground (i.e., crop samples) and the background (i.e., the soil) of the patches. Quantitative experiments, conducted on publicly available datasets, demonstrate the effectiveness of the proposed approach. The source code and data discussed in this work are available as open source.
LLCoach: Generating Robot Soccer Plans using Multi-Role Large Language Models
Jun 26, 2024The deployment of robots into human scenarios necessitates advanced planning strategies, particularly when we ask robots to operate in dynamic, unstructured environments. RoboCup offers the chance to deploy robots in one of those scenarios, a human-shaped game represented by a soccer match. In such scenarios, robots must operate using predefined behaviors that can fail in unpredictable conditions. This paper introduces a novel application of Large Language Models (LLMs) to address the challenge of generating actionable plans in such settings, specifically within the context of the RoboCup Standard Platform League (SPL) competitions where robots are required to autonomously execute soccer strategies that emerge from the interactions of individual agents. In particular, we propose a multi-role approach leveraging the capabilities of LLMs to generate and refine plans for a robotic soccer team. The potential of the proposed method is demonstrated through an experimental evaluation,carried out simulating multiple matches where robots with AI-generated plans play against robots running human-built code.
Play Everywhere: A Temporal Logic based Game Environment Independent Approach for Playing Soccer with Robots
May 21, 2024Robots playing soccer often rely on hard-coded behaviors that struggle to generalize when the game environment change. In this paper, we propose a temporal logic based approach that allows robots' behaviors and goals to adapt to the semantics of the environment. In particular, we present a hierarchical representation of soccer in which the robot selects the level of operation based on the perceived semantic characteristics of the environment, thus modifying dynamically the set of rules and goals to apply. The proposed approach enables the robot to operate in unstructured environments, just as it happens when humans go from soccer played on an official field to soccer played on a street. Three different use cases set in different scenarios are presented to demonstrate the effectiveness of the proposed approach.
* RoboCup 2023: Robot World Cup XXVI Best Paper
LLM Based Multi-Agent Generation of Semi-structured Documents from Semantic Templates in the Public Administration Domain
Feb 21, 2024
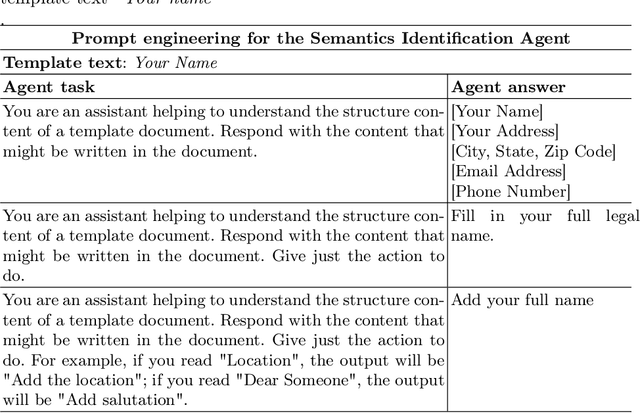
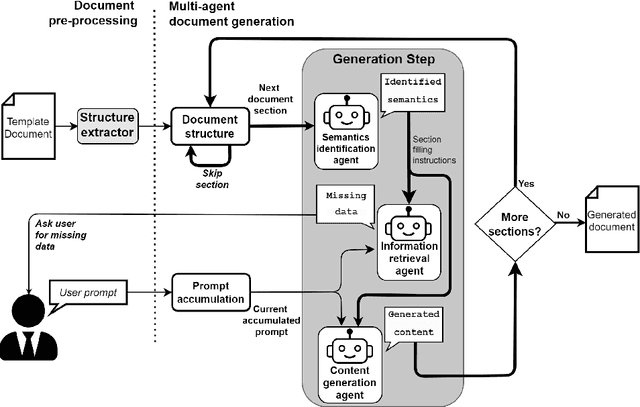

In the last years' digitalization process, the creation and management of documents in various domains, particularly in Public Administration (PA), have become increasingly complex and diverse. This complexity arises from the need to handle a wide range of document types, often characterized by semi-structured forms. Semi-structured documents present a fixed set of data without a fixed format. As a consequence, a template-based solution cannot be used, as understanding a document requires the extraction of the data structure. The recent introduction of Large Language Models (LLMs) has enabled the creation of customized text output satisfying user requests. In this work, we propose a novel approach that combines the LLMs with prompt engineering and multi-agent systems for generating new documents compliant with a desired structure. The main contribution of this work concerns replacing the commonly used manual prompting with a task description generated by semantic retrieval from an LLM. The potential of this approach is demonstrated through a series of experiments and case studies, showcasing its effectiveness in real-world PA scenarios.