 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLCoach: Generating Robot Soccer Plans using Multi-Role Large Language Models
Jun 26, 2024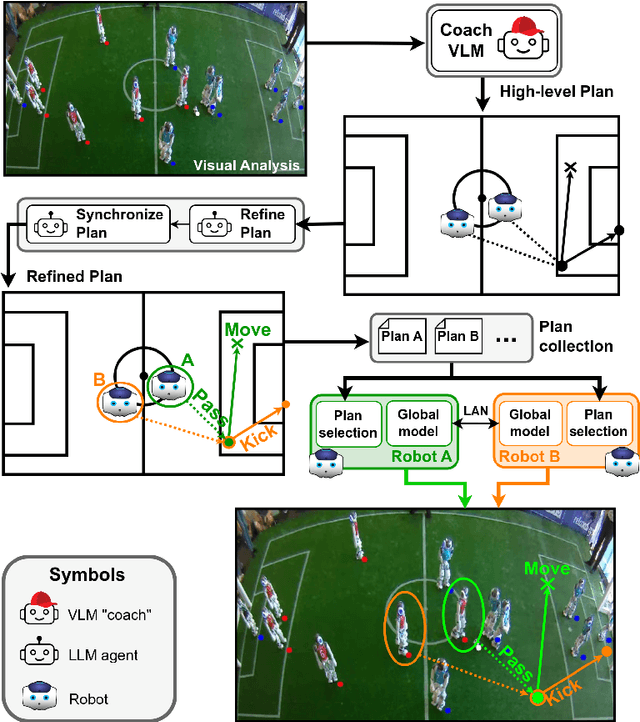
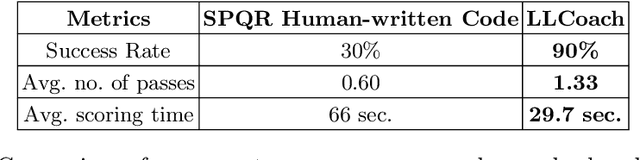
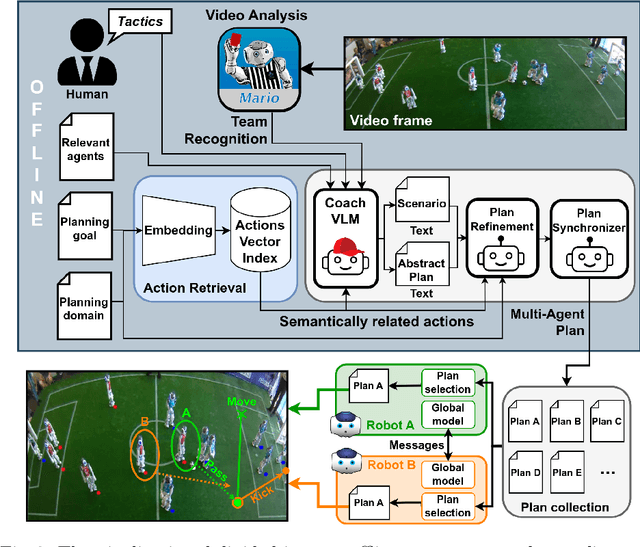
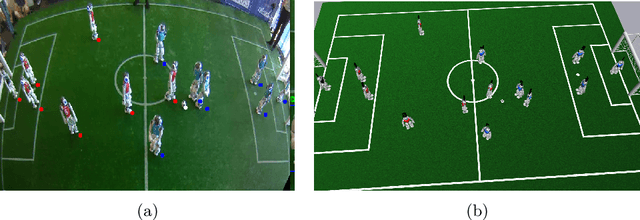
The deployment of robots into human scenarios necessitates advanced planning strategies, particularly when we ask robots to operate in dynamic, unstructured environments. RoboCup offers the chance to deploy robots in one of those scenarios, a human-shaped game represented by a soccer match. In such scenarios, robots must operate using predefined behaviors that can fail in unpredictable conditions. This paper introduces a novel application of Large Language Models (LLMs) to address the challenge of generating actionable plans in such settings, specifically within the context of the RoboCup Standard Platform League (SPL) competitions where robots are required to autonomously execute soccer strategies that emerge from the interactions of individual agents. In particular, we propose a multi-role approach leveraging the capabilities of LLMs to generate and refine plans for a robotic soccer team. The potential of the proposed method is demonstrated through an experimental evaluation,carried out simulating multiple matches where robots with AI-generated plans play against robots running human-built code.
MARIO: Modular and Extensible Architecture for Computing Visual Statistics in RoboCup SPL
Sep 20, 2022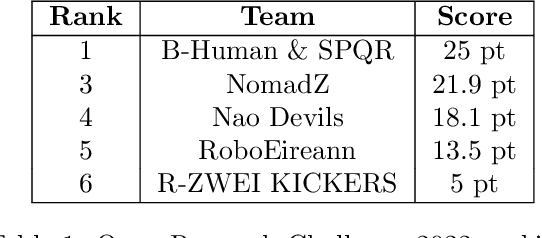
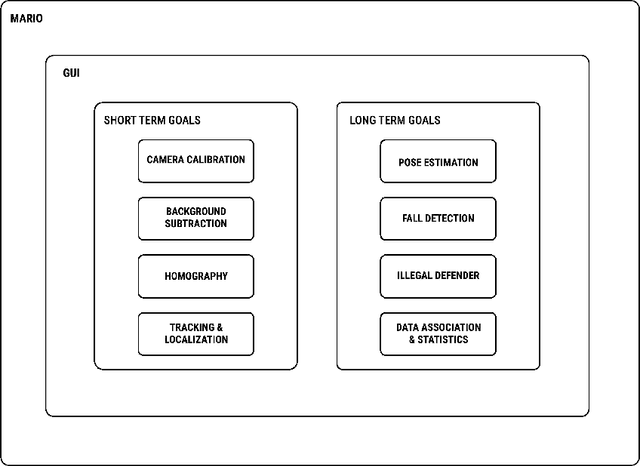
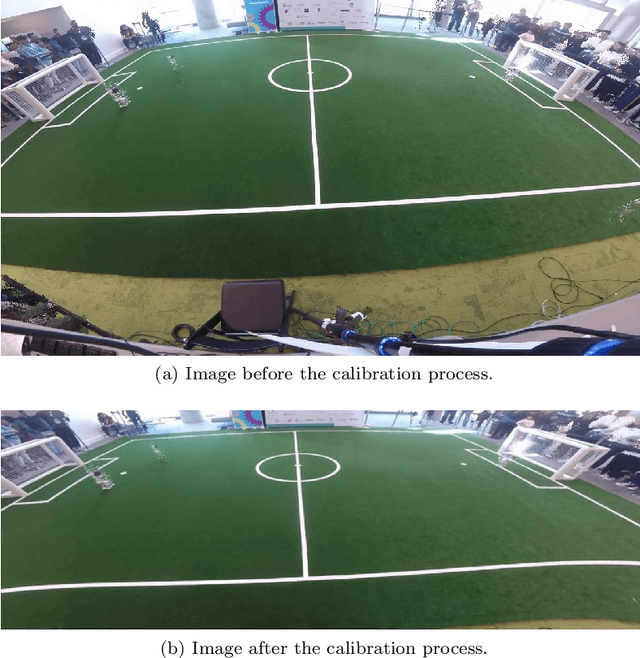

This technical report describes a modular and extensible architecture for computing visual statistics in RoboCup SPL (MARIO), presented during the SPL Open Research Challenge at RoboCup 2022, held in Bangkok (Thailand). MARIO is an open-source, ready-to-use software application whose final goal is to contribute to the growth of the RoboCup SPL community. MARIO comes with a GUI that integrates multiple machine learning and computer vision based functions, including automatic camera calibration, background subtraction, homography computation, player + ball tracking and localization, NAO robot pose estimation and fall detection. MARIO has been ranked no. 1 in the Open Research Challenge.