 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti Robot Coordination in Highly Dynamic Environments: Tackling Asymmetric Obstacles and Limited Communication
Sep 09, 2025Coordinating a fully distributed multi-agent system (MAS) can be challenging when the communication channel has very limited capabilities in terms of sending rate and packet payload. When the MAS has to deal with active obstacles in a highly partially observable environment, the communication channel acquires considerable relevance. In this paper, we present an approach to deal with task assignments in extremely active scenarios, where tasks need to be frequently reallocated among the agents participating in the coordination process. Inspired by market-based task assignments, we introduce a novel distributed coordination method to orchestrate autonomous agents' actions efficiently in low communication scenarios. In particular, our algorithm takes into account asymmetric obstacles. While in the real world, the majority of obstacles are asymmetric, they are usually treated as symmetric ones, thus limiting the applicability of existing methods. To summarize, the presented architecture is designed to tackle scenarios where the obstacles are active and asymmetric, the communication channel is poor and the environment is partially observable. Our approach has been validated in simulation and in the real world, using a team of NAO robots during official RoboCup competitions. Experimental results show a notable reduction in task overlaps in limited communication settings, with a decrease of 52% in the most frequent reallocated task.
Real-Time Multimodal Signal Processing for HRI in RoboCup: Understanding a Human Referee
Nov 26, 2024


Advancing human-robot communication is crucial for autonomous systems operating in dynamic environments, where accurate real-time interpretation of human signals is essential. RoboCup provides a compelling scenario for testing these capabilities, requiring robots to understand referee gestures and whistle with minimal network reliance. Using the NAO robot platform, this study implements a two-stage pipeline for gesture recognition through keypoint extraction and classification, alongside continuous convolutional neural networks (CCNNs) for efficient whistle detection. The proposed approach enhances real-time human-robot interaction in a competitive setting like RoboCup, offering some tools to advance the development of autonomous systems capable of cooperating with humans.
LLCoach: Generating Robot Soccer Plans using Multi-Role Large Language Models
Jun 26, 2024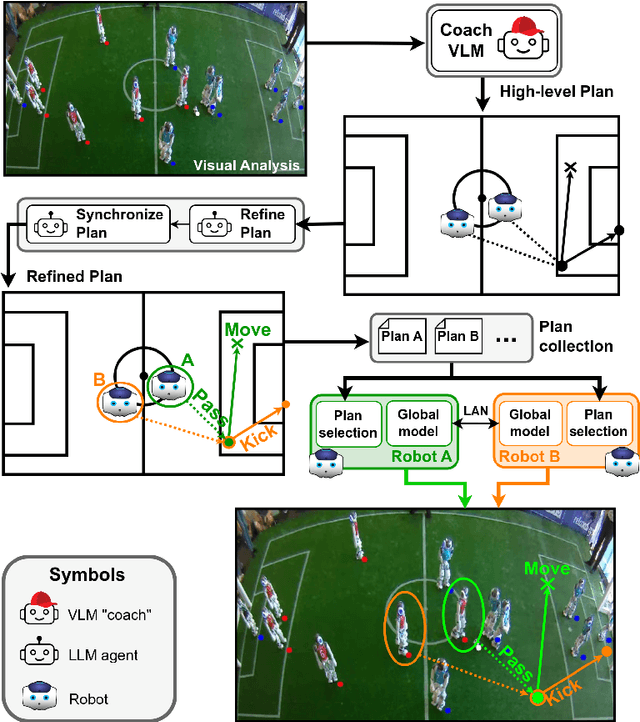
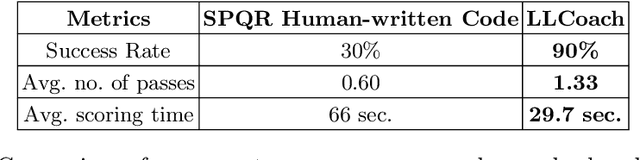
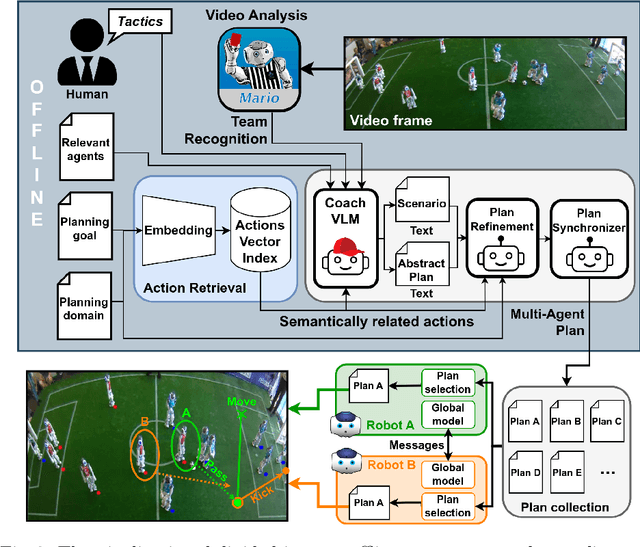
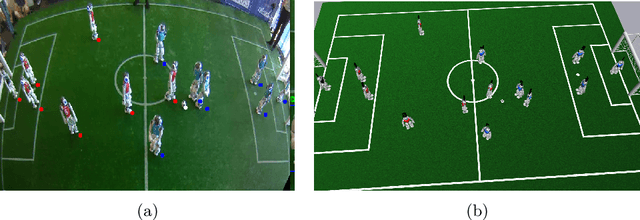
The deployment of robots into human scenarios necessitates advanced planning strategies, particularly when we ask robots to operate in dynamic, unstructured environments. RoboCup offers the chance to deploy robots in one of those scenarios, a human-shaped game represented by a soccer match. In such scenarios, robots must operate using predefined behaviors that can fail in unpredictable conditions. This paper introduces a novel application of Large Language Models (LLMs) to address the challenge of generating actionable plans in such settings, specifically within the context of the RoboCup Standard Platform League (SPL) competitions where robots are required to autonomously execute soccer strategies that emerge from the interactions of individual agents. In particular, we propose a multi-role approach leveraging the capabilities of LLMs to generate and refine plans for a robotic soccer team. The potential of the proposed method is demonstrated through an experimental evaluation,carried out simulating multiple matches where robots with AI-generated plans play against robots running human-built code.
Multi-Agent Coordination for a Partially Observable and Dynamic Robot Soccer Environment with Limited Communication
Jan 26, 2024RoboCup represents an International testbed for advancing research in AI and robotics, focusing on a definite goal: developing a robot team that can win against the human world soccer champion team by the year 2050. To achieve this goal, autonomous humanoid robots' coordination is crucial. This paper explores novel solutions within the RoboCup Standard Platform League (SPL), where a reduction in WiFi communication is imperative, leading to the development of new coordination paradigms. The SPL has experienced a substantial decrease in network packet rate, compelling the need for advanced coordination architectures to maintain optimal team functionality in dynamic environments. Inspired by market-based task assignment, we introduce a novel distributed coordination system to orchestrate autonomous robots' actions efficiently in low communication scenarios. This approach has been tested with NAO robots during official RoboCup competitions and in the SimRobot simulator, demonstrating a notable reduction in task overlaps in limited communication settings.