 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLCoach: Generating Robot Soccer Plans using Multi-Role Large Language Models
Paper and Code
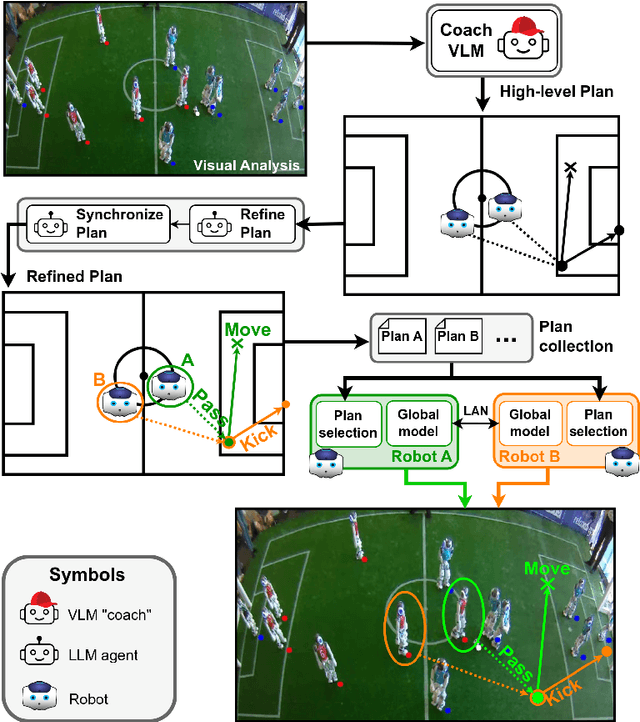
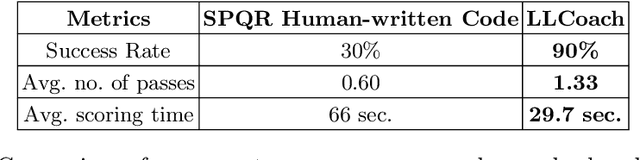
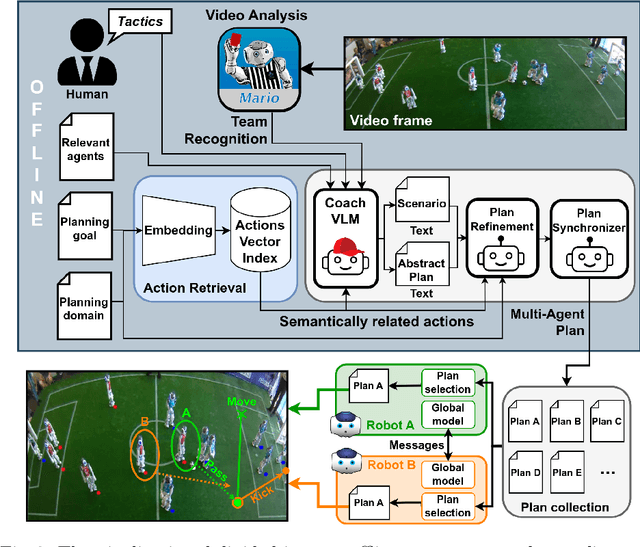
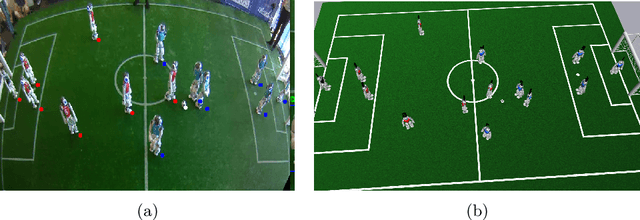
The deployment of robots into human scenarios necessitates advanced planning strategies, particularly when we ask robots to operate in dynamic, unstructured environments. RoboCup offers the chance to deploy robots in one of those scenarios, a human-shaped game represented by a soccer match. In such scenarios, robots must operate using predefined behaviors that can fail in unpredictable conditions. This paper introduces a novel application of Large Language Models (LLMs) to address the challenge of generating actionable plans in such settings, specifically within the context of the RoboCup Standard Platform League (SPL) competitions where robots are required to autonomously execute soccer strategies that emerge from the interactions of individual agents. In particular, we propose a multi-role approach leveraging the capabilities of LLMs to generate and refine plans for a robotic soccer team. The potential of the proposed method is demonstrated through an experimental evaluation,carried out simulating multiple matches where robots with AI-generated plans play against robots running human-built code.