 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKnowledge-Guided Manipulation Using Multi-Task Reinforcement Learning
Mar 25, 2026This paper introduces Knowledge Graph based Massively Multi-task Model-based Policy Optimization (KG-M3PO), a framework for multi-task robotic manipulation in partially observable settings that unifies Perception, Knowledge, and Policy. The method augments egocentric vision with an online 3D scene graph that grounds open-vocabulary detections into a metric, relational representation. A dynamic-relation mechanism updates spatial, containment, and affordance edges at every step, and a graph neural encoder is trained end-to-end through the RL objective so that relational features are shaped directly by control performance. Multiple observation modalities (visual, proprioceptive, linguistic, and graph-based) are encoded into a shared latent space, upon which the RL agent operates to drive the control loop. The policy conditions on lightweight graph queries alongside visual and proprioceptive inputs, yielding a compact, semantically informed state for decision making. Experiments on a suite of manipulation tasks with occlusions, distractors, and layout shifts demonstrate consistent gains over strong baselines: the knowledge-conditioned agent achieves higher success rates, improved sample efficiency, and stronger generalization to novel objects and unseen scene configurations. These results support the premise that structured, continuously maintained world knowledge is a powerful inductive bias for scalable, generalizable manipulation: when the knowledge module participates in the RL computation graph, relational representations align with control, enabling robust long-horizon behavior under partial observability.
SGN-CIRL: Scene Graph-based Navigation with Curriculum, Imitation, and Reinforcement Learning
Jun 04, 2025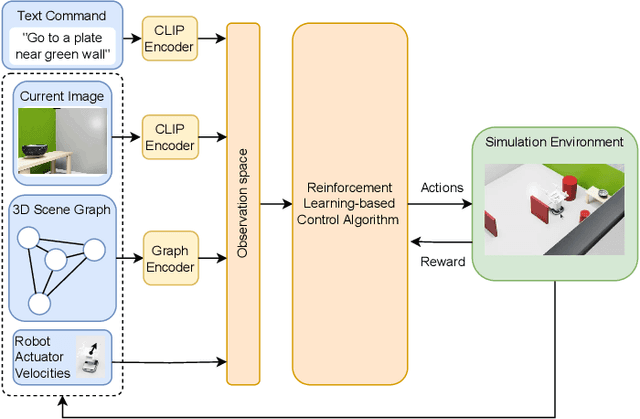
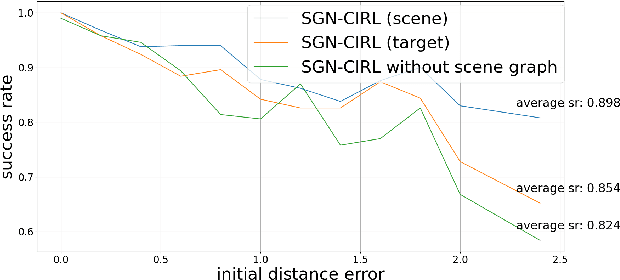
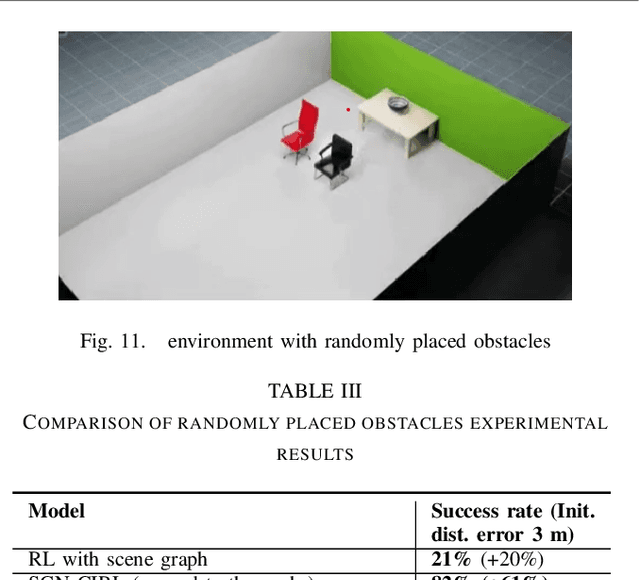
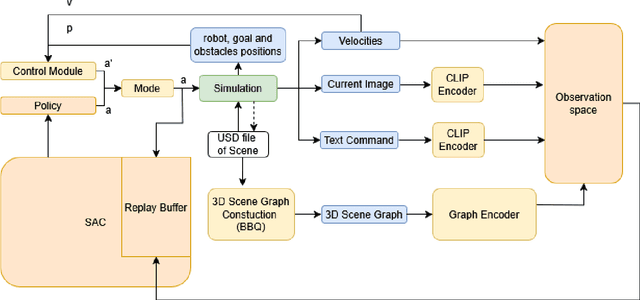
The 3D scene graph models spatial relationships between objects, enabling the agent to efficiently navigate in a partially observable environment and predict the location of the target object.This paper proposes an original framework named SGN-CIRL (3D Scene Graph-Based Reinforcement Learning Navigation) for mapless reinforcement learning-based robot navigation with learnable representation of open-vocabulary 3D scene graph. To accelerate and stabilize the training of reinforcement learning-based algorithms, the framework also employs imitation learning and curriculum learning. The first one enables the agent to learn from demonstrations, while the second one structures the training process by gradually increasing task complexity from simple to more advanced scenarios. Numerical experiments conducted in the Isaac Sim environment showed that using a 3D scene graph for reinforcement learning significantly increased the success rate in difficult navigation cases. The code is open-sourced and available at: https://github.com/Xisonik/Aloha\_graph.
TOCALib: Optimal control library with interpolation for bimanual manipulation and obstacles avoidance
Apr 10, 2025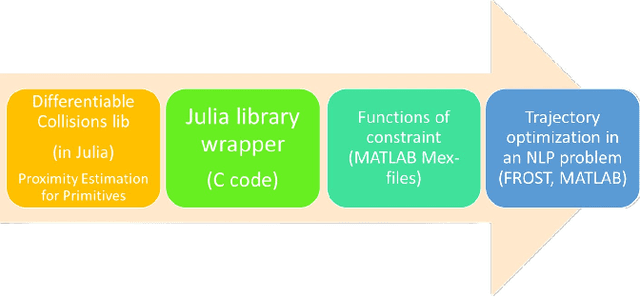



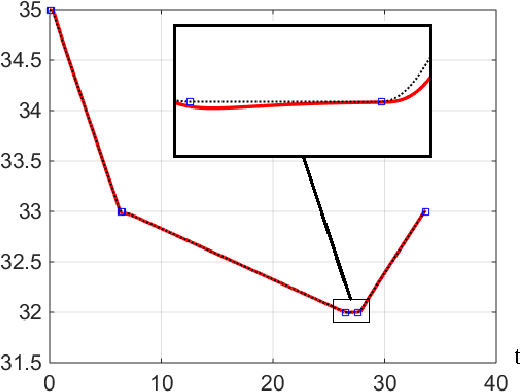
The paper presents a new approach for constructing a library of optimal trajectories for two robotic manipulators, Two-Arm Optimal Control and Avoidance Library (TOCALib). The optimisation takes into account kinodynamic and other constraints within the FROST framework. The novelty of the method lies in the consideration of collisions using the DCOL method, which allows obtaining symbolic expressions for assessing the presence of collisions and using them in gradient-based optimization control methods. The proposed approach allowed the implementation of complex bimanual manipulations. In this paper we used Mobile Aloha as an example of TOCALib application. The approach can be extended to other bimanual robots, as well as to gait control of bipedal robots. It can also be used to construct training data for machine learning tasks for manipulation.
Benchmarking the Full-Order Model Optimization Based Imitation in the Humanoid Robot Reinforcement Learning Walk
Dec 15, 2023



When a gait of a bipedal robot is developed using deep reinforcement learning, reference trajectories may or may not be used. Each approach has its advantages and disadvantages, and the choice of method is up to the control developer. This paper investigates the effect of reference trajectories on locomotion learning and the resulting gaits. We implemented three gaits of a full-order anthropomorphic robot model with different reward imitation ratios, provided sim-to-sim control policy transfer, and compared the gaits in terms of robustness and energy efficiency. In addition, we conducted a qualitative analysis of the gaits by interviewing people, since our task was to create an appealing and natural gait for a humanoid robot. According to the results of the experiments, the most successful approach was the one in which the average value of rewards for imitation and adherence to command velocity per episode remained balanced throughout the training. The gait obtained with this method retains naturalness (median of 3.6 according to the user study) compared to the gait trained with imitation only (median of 4.0), while remaining robust close to the gait trained without reference trajectories.
Combining Safe Interval Path Planning and Constrained Path Following Control: Preliminary Results
Jun 17, 2019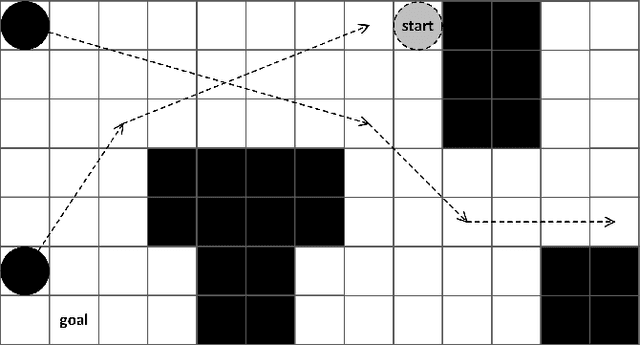


We study the navigation problem for a robot moving amidst static and dynamic obstacles and rely on a hierarchical approach to solve it. First, the reference trajectory is planned by the safe interval path planning algorithm that is capable of handling any-angle translations and rotations. Second, the path following problem is treated as the constrained control problem and the original flatness-based approach is proposed to generate control. We suggest a few enhancements for the path planning algorithm aimed at finding trajectories that are more likely to be followed by a robot without collisions. Results of the conducted experimental evaluation show that the number of successfully solved navigation instances significantly increases when using the suggested techniques.