 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCombining Safe Interval Path Planning and Constrained Path Following Control: Preliminary Results
Paper and Code
Jun 17, 2019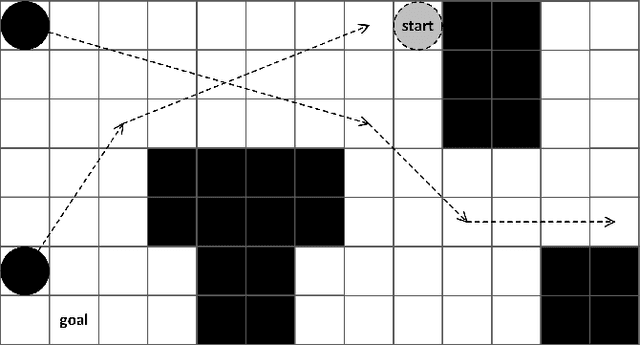

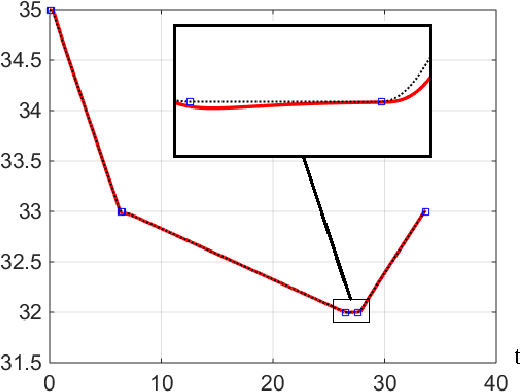

We study the navigation problem for a robot moving amidst static and dynamic obstacles and rely on a hierarchical approach to solve it. First, the reference trajectory is planned by the safe interval path planning algorithm that is capable of handling any-angle translations and rotations. Second, the path following problem is treated as the constrained control problem and the original flatness-based approach is proposed to generate control. We suggest a few enhancements for the path planning algorithm aimed at finding trajectories that are more likely to be followed by a robot without collisions. Results of the conducted experimental evaluation show that the number of successfully solved navigation instances significantly increases when using the suggested techniques.