 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecARt Leg: Design and Evaluation of a Novel Humanoid Robot Leg with Decoupled Actuation for Agile Locomotion
Nov 13, 2025In this paper, we propose a novel design of an electrically actuated robotic leg, called the DecARt (Decoupled Actuation Robot) Leg, aimed at performing agile locomotion. This design incorporates several new features, such as the use of a quasi-telescopic kinematic structure with rotational motors for decoupled actuation, a near-anthropomorphic leg appearance with a forward facing knee, and a novel multi-bar system for ankle torque transmission from motors placed above the knee. To analyze the agile locomotion capabilities of the design numerically, we propose a new descriptive metric, called the `Fastest Achievable Swing Time` (FAST), and perform a quantitative evaluation of the proposed design and compare it with other designs. Then we evaluate the performance of the DecARt Leg-based robot via extensive simulation and preliminary hardware experiments.
Achieving Precise and Reliable Locomotion with Differentiable Simulation-Based System Identification
Aug 06, 2025Accurate system identification is crucial for reducing trajectory drift in bipedal locomotion, particularly in reinforcement learning and model-based control. In this paper, we present a novel control framework that integrates system identification into the reinforcement learning training loop using differentiable simulation. Unlike traditional approaches that rely on direct torque measurements, our method estimates system parameters using only trajectory data (positions, velocities) and control inputs. We leverage the differentiable simulator MuJoCo-XLA to optimize system parameters, ensuring that simulated robot behavior closely aligns with real-world motion. This framework enables scalable and flexible parameter optimization. Accurate system identification is crucial for reducing trajectory drift in bipedal locomotion, particularly in reinforcement learning and model-based control. In this paper, we present a novel control framework that integrates system identification into the reinforcement learning training loop using differentiable simulation. Unlike traditional approaches that rely on direct torque measurements, our method estimates system parameters using only trajectory data (positions, velocities) and control inputs. We leverage the differentiable simulator MuJoCo-XLA to optimize system parameters, ensuring that simulated robot behavior closely aligns with real-world motion. This framework enables scalable and flexible parameter optimization. It supports fundamental physical properties such as mass and inertia. Additionally, it handles complex system nonlinear behaviors, including advanced friction models, through neural network approximations. Experimental results show that our framework significantly improves trajectory following.
Benchmarking the Full-Order Model Optimization Based Imitation in the Humanoid Robot Reinforcement Learning Walk
Dec 15, 2023



When a gait of a bipedal robot is developed using deep reinforcement learning, reference trajectories may or may not be used. Each approach has its advantages and disadvantages, and the choice of method is up to the control developer. This paper investigates the effect of reference trajectories on locomotion learning and the resulting gaits. We implemented three gaits of a full-order anthropomorphic robot model with different reward imitation ratios, provided sim-to-sim control policy transfer, and compared the gaits in terms of robustness and energy efficiency. In addition, we conducted a qualitative analysis of the gaits by interviewing people, since our task was to create an appealing and natural gait for a humanoid robot. According to the results of the experiments, the most successful approach was the one in which the average value of rewards for imitation and adherence to command velocity per episode remained balanced throughout the training. The gait obtained with this method retains naturalness (median of 3.6 according to the user study) compared to the gait trained with imitation only (median of 4.0), while remaining robust close to the gait trained without reference trajectories.
RoboKit-MV: an Educational Initiative
Nov 22, 2021
In this paper, we present a robot model and code base for affordable education in the field of humanoid robotics. We give an overview of the software and hardware of a robot that won several competitions with the team RoboKit in 2019-2021, provide analysis of the contemporary market of education in robotics, and highlight the reasoning beyond certain design solutions.
Starkit: RoboCup Humanoid KidSize 2021 Worldwide Champion Team Paper
Oct 15, 2021



This article is devoted to the features that were under development between RoboCup 2019 Sydney and RoboCup 2021 Worldwide. These features include vision-related matters, such as detection and localization, mechanical and algorithmic novelties. Since the competition was held virtually, the simulation-specific features are also considered in the article. We give an overview of the approaches that were tried out along with the analysis of their preconditions, perspectives and the evaluation of their performance.
Tiny-YOLO object detection supplemented with geometrical data
Aug 05, 2020

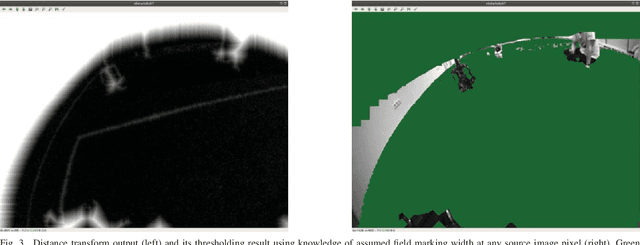
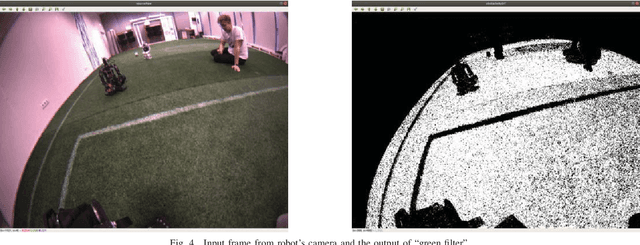
We propose a method of improving detection precision (mAP) with the help of the prior knowledge about the scene geometry: we assume the scene to be a plane with objects placed on it. We focus our attention on autonomous robots, so given the robot's dimensions and the inclination angles of the camera, it is possible to predict the spatial scale for each pixel of the input frame. With slightly modified YOLOv3-tiny we demonstrate that the detection supplemented by the scale channel, further referred as S, outperforms standard RGB-based detection with small computational overhead.