 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeC3S Micro-architectural Enhancement: Spike Encoder Block and Relaxing Gamma Clock (Asynchronous)
Jun 26, 2023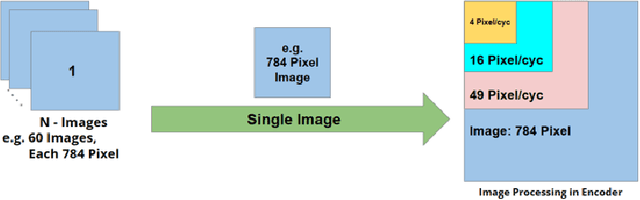
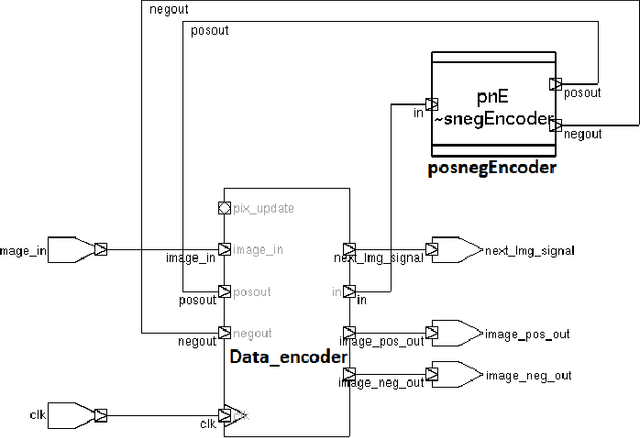
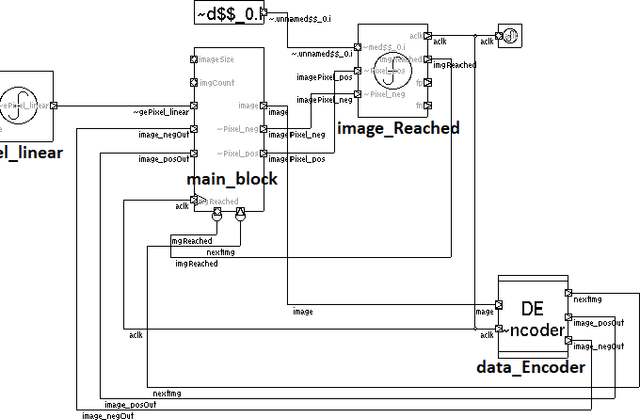
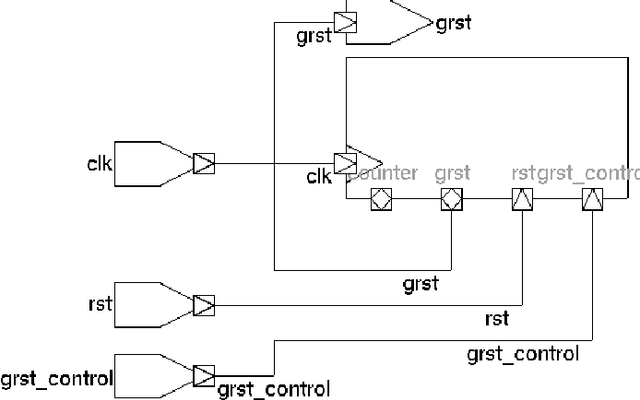
The field of neuromorphic computing is rapidly evolving. As both biological accuracy and practical implementations are explored, existing architectures are modified and improved for both purposes. The Temporal Neural Network(TNN) style of architecture is a good basis for approximating biological neurons due to its use of timed pulses to encode data and a voltage-threshold-like system. Using the Temporal Neural Network cortical column C3S architecture design as a basis, this project seeks to augment the network's design. This project takes note of two ideas and presents their designs with the goal of improving existing cortical column architecture. One need in this field is for an encoder that could convert between common digital formats and timed neuronal spikes, as biologically accurate networks are temporal in nature. To this end, this project presents an encoder to translate between binary encoded values and timed spikes to be processed by the neural network. Another need is for the reduction of wasted processing time to idleness, caused by lengthy Gamma cycle processing bursts. To this end, this project presents a relaxation of Gamma cycles to allow for them to end arbitrarily early once the network has determined an output response. With the goal of contributing to the betterment of the field of neuromorphic computer architecture, designs for both a binary-to-spike encoder, as well as a Gamma cycle controller, are presented and evaluated for optimal design parameters, with overall system gain and performance.
RoboKit-MV: an Educational Initiative
Nov 22, 2021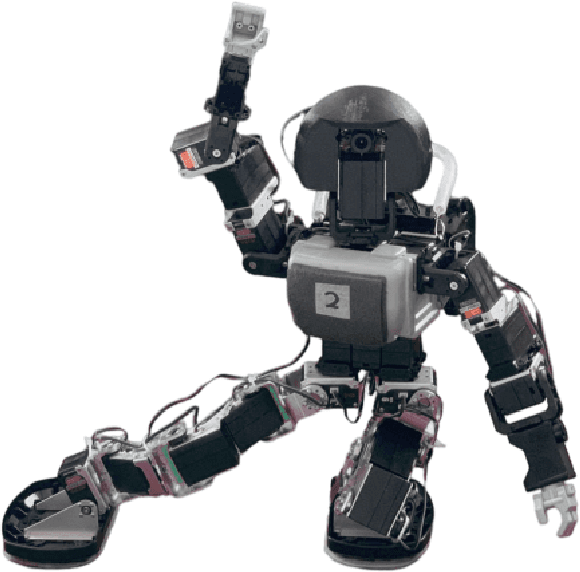
In this paper, we present a robot model and code base for affordable education in the field of humanoid robotics. We give an overview of the software and hardware of a robot that won several competitions with the team RoboKit in 2019-2021, provide analysis of the contemporary market of education in robotics, and highlight the reasoning beyond certain design solutions.
Starkit: RoboCup Humanoid KidSize 2021 Worldwide Champion Team Paper
Oct 15, 2021



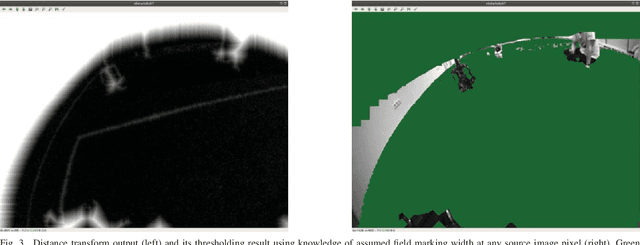
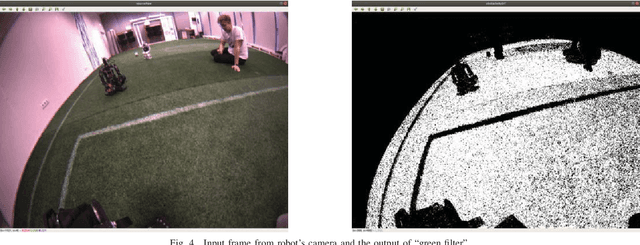
This article is devoted to the features that were under development between RoboCup 2019 Sydney and RoboCup 2021 Worldwide. These features include vision-related matters, such as detection and localization, mechanical and algorithmic novelties. Since the competition was held virtually, the simulation-specific features are also considered in the article. We give an overview of the approaches that were tried out along with the analysis of their preconditions, perspectives and the evaluation of their performance.
Tiny-YOLO object detection supplemented with geometrical data
Aug 05, 2020

We propose a method of improving detection precision (mAP) with the help of the prior knowledge about the scene geometry: we assume the scene to be a plane with objects placed on it. We focus our attention on autonomous robots, so given the robot's dimensions and the inclination angles of the camera, it is possible to predict the spatial scale for each pixel of the input frame. With slightly modified YOLOv3-tiny we demonstrate that the detection supplemented by the scale channel, further referred as S, outperforms standard RGB-based detection with small computational overhead.
Planning to Score a Goal in Robotic Football with Heuristic Search
Aug 04, 2020
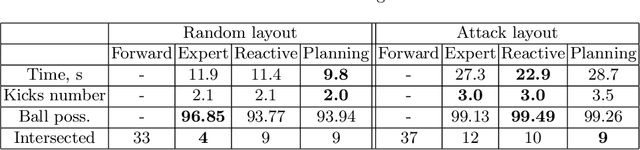
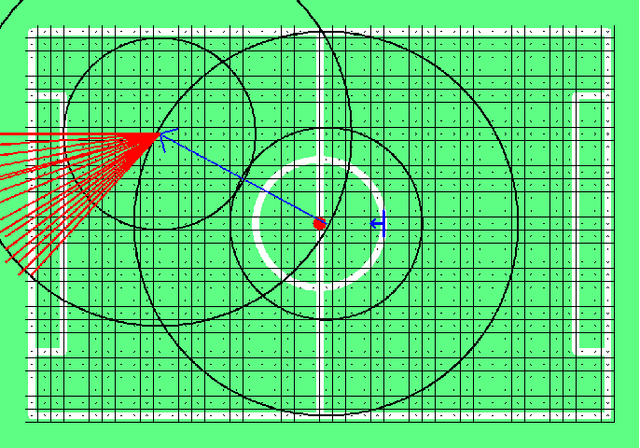
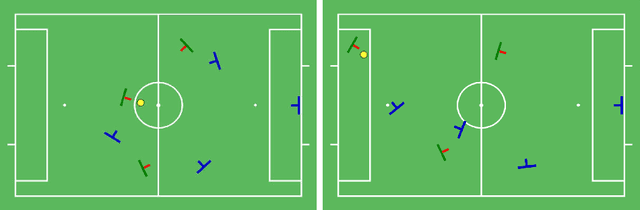
This paper considers a problem of planning an attack in robotic football (RoboCup). The problem is reduced to finding a trajectory of the ball from its current position to the opponents goals. Heuristic search algorithm, i.e. A*, is used to find such a trajectory. For this algorithm to be applicable we introduce a discretized model of the environment, i.e. a graph, as well as the core search components: cost function and heuristic function. Both are designed to take into account all the available information of the game state. We extensively evaluate the suggested approach in simulation comparing it to a range of baselines. The result of the conducted evaluation clearly shows the benefit of utilizing heuristic search within the RoboCup context.