 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning to Score a Goal in Robotic Football with Heuristic Search
Paper and Code

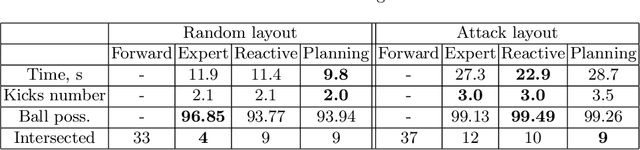
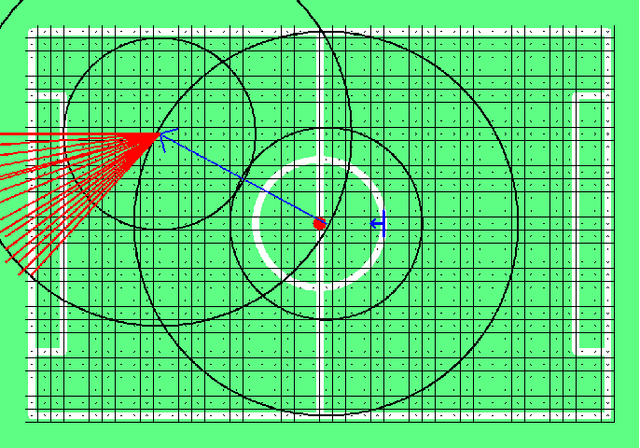
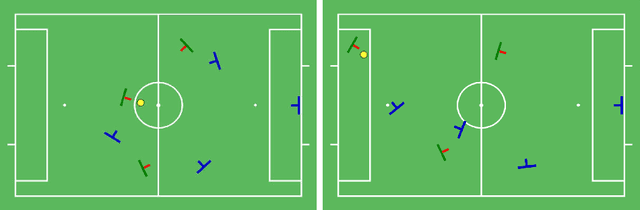
This paper considers a problem of planning an attack in robotic football (RoboCup). The problem is reduced to finding a trajectory of the ball from its current position to the opponents goals. Heuristic search algorithm, i.e. A*, is used to find such a trajectory. For this algorithm to be applicable we introduce a discretized model of the environment, i.e. a graph, as well as the core search components: cost function and heuristic function. Both are designed to take into account all the available information of the game state. We extensively evaluate the suggested approach in simulation comparing it to a range of baselines. The result of the conducted evaluation clearly shows the benefit of utilizing heuristic search within the RoboCup context.