Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTiny-YOLO object detection supplemented with geometrical data
Aug 05, 2020

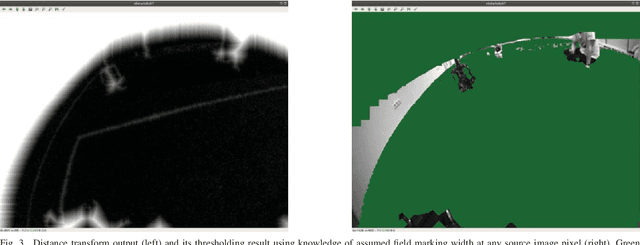
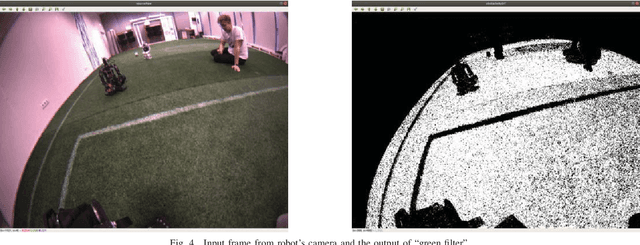
We propose a method of improving detection precision (mAP) with the help of the prior knowledge about the scene geometry: we assume the scene to be a plane with objects placed on it. We focus our attention on autonomous robots, so given the robot's dimensions and the inclination angles of the camera, it is possible to predict the spatial scale for each pixel of the input frame. With slightly modified YOLOv3-tiny we demonstrate that the detection supplemented by the scale channel, further referred as S, outperforms standard RGB-based detection with small computational overhead.
* 5 pages, 5 figures, published in 2020 IEEE 91st Vehicular Technology
Conference (VTC2020-Spring)
Via