 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating Trust in Human-Robot Collaboration through Behavioral Indicators and Explainability
Jan 27, 2026Industry 5.0 focuses on human-centric collaboration between humans and robots, prioritizing safety, comfort, and trust. This study introduces a data-driven framework to assess trust using behavioral indicators. The framework employs a Preference-Based Optimization algorithm to generate trust-enhancing trajectories based on operator feedback. This feedback serves as ground truth for training machine learning models to predict trust levels from behavioral indicators. The framework was tested in a chemical industry scenario where a robot assisted a human operator in mixing chemicals. Machine learning models classified trust with over 80\% accuracy, with the Voting Classifier achieving 84.07\% accuracy and an AUC-ROC score of 0.90. These findings underscore the effectiveness of data-driven methods in assessing trust within human-robot collaboration, emphasizing the valuable role behavioral indicators play in predicting the dynamics of human trust.
Design of an Energy-Aware Cartesian Impedance Controller for Collaborative Disassembly
Feb 09, 2023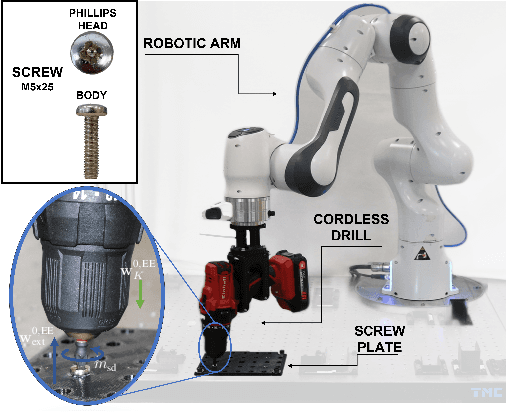
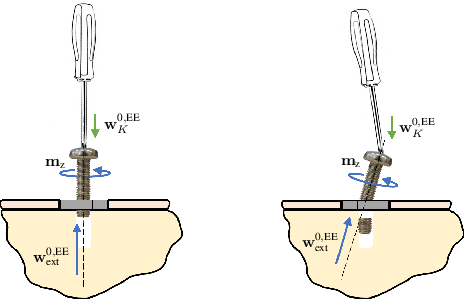
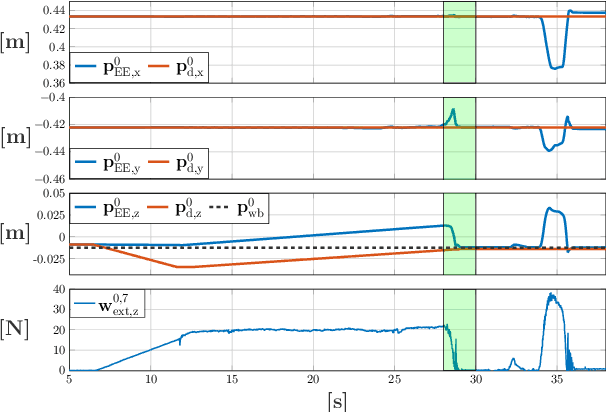
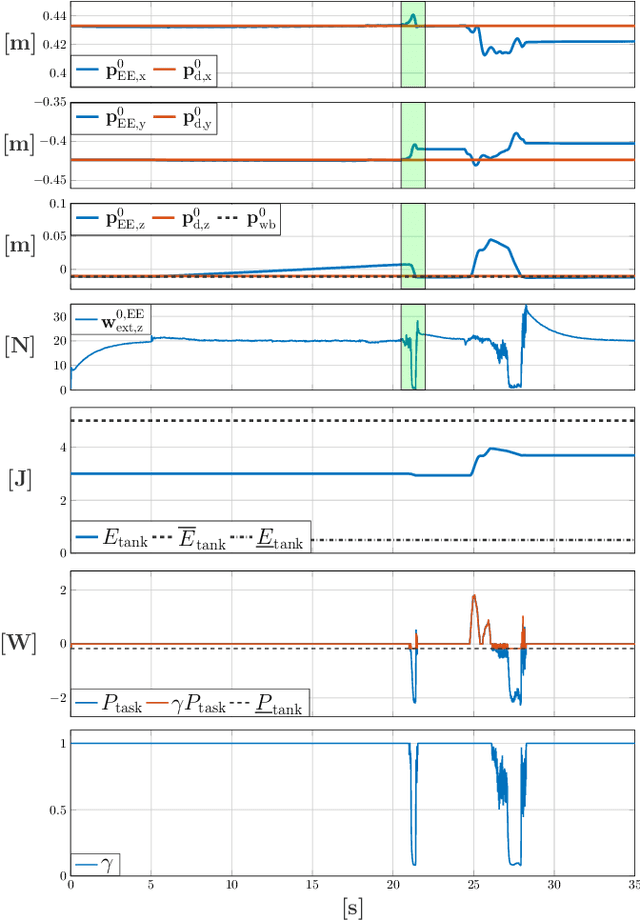
Human-robot collaborative disassembly is an emerging trend in the sustainable recycling process of electronic and mechanical products. It requires the use of advanced technologies to assist workers in repetitive physical tasks and deal with creaky and potentially damaged components. Nevertheless, when disassembling worn-out or damaged components, unexpected robot behaviors may emerge, so harmless and symbiotic physical interaction with humans and the environment becomes paramount. This work addresses this challenge at the control level by ensuring safe and passive behaviors in unplanned interactions and contact losses. The proposed algorithm capitalizes on an energy-aware Cartesian impedance controller, which features energy scaling and damping injection, and an augmented energy tank, which limits the power flow from the controller to the robot. The controller is evaluated in a real-world flawed unscrewing task with a Franka Emika Panda and is compared to a standard impedance controller and a hybrid force-impedance controller. The results demonstrate the high potential of the algorithm in human-robot collaborative disassembly tasks.
skrl: Modular and Flexible Library for Reinforcement Learning
Feb 08, 2022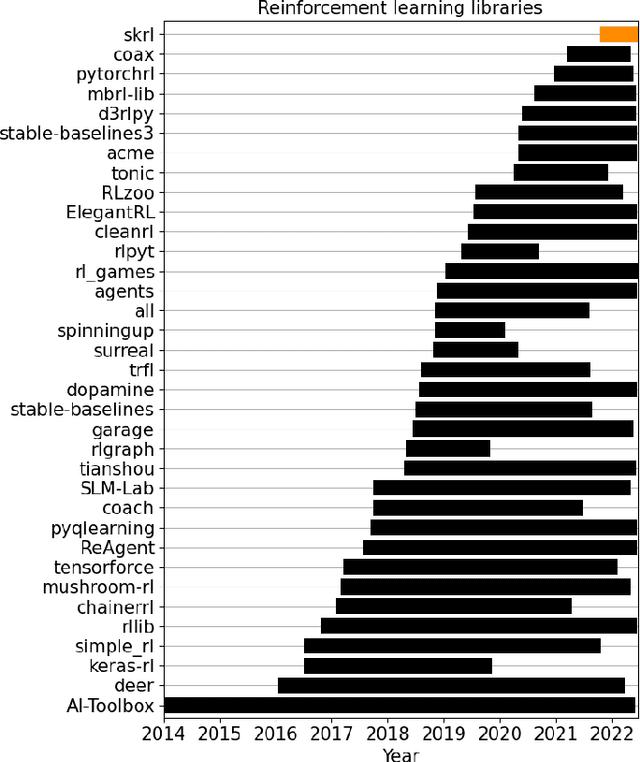
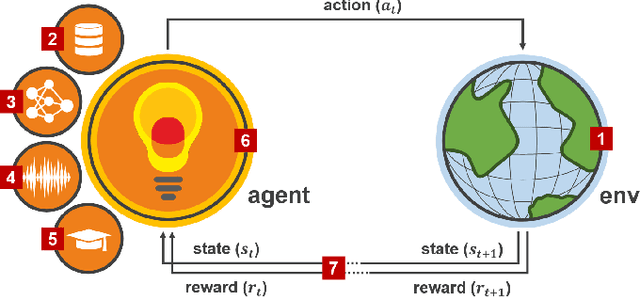
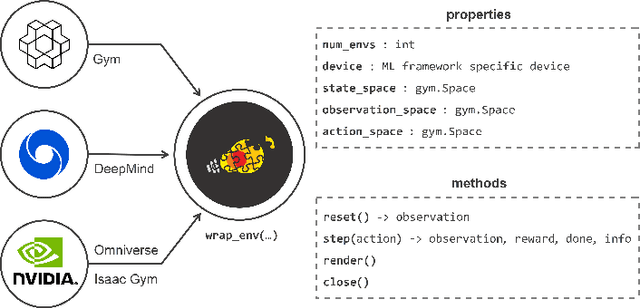
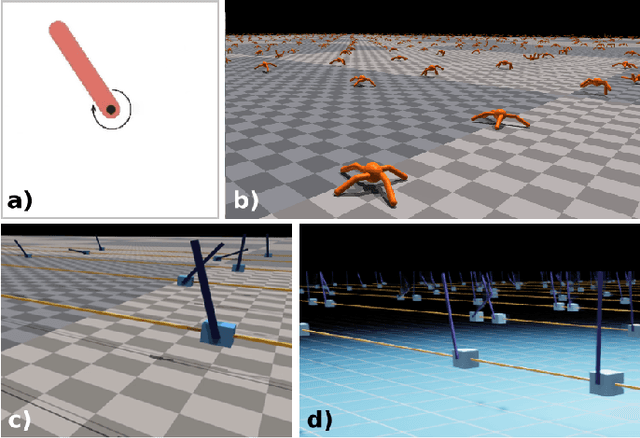
skrl is an open-source modular library for reinforcement learning written in Python and designed with a focus on readability, simplicity, and transparency of algorithm implementations. Apart from supporting environments that use the traditional OpenAI Gym interface, it allows loading, configuring, and operating NVIDIA Isaac Gym environments, enabling the parallel training of several agents with adjustable scopes, which may or may not share resources, in the same execution. The library's documentation can be found at https://skrl.readthedocs.io and its source code is available on GitHub at url{https://github.com/Toni-SM/skrl.
3D Maps Registration and Path Planning for Autonomous Robot Navigation
Dec 10, 2013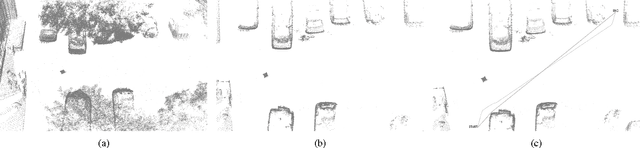


Mobile robots dedicated in security tasks should be capable of clearly perceiving their environment to competently navigate within cluttered areas, so as to accomplish their assigned mission. The paper in hand describes such an autonomous agent designed to deploy competently in hazardous environments equipped with a laser scanner sensor. During the robot's motion, consecutive scans are obtained to produce dense 3D maps of the area. A 3D point cloud registration technique is exploited to merge the successively created maps during the robot's motion followed by an ICP refinement step. The reconstructed 3D area is then top-down projected with great resolution, to be fed in a path planning algorithm suitable to trace obstacle-free trajectories in the explored area. The main characteristic of the path planner is that the robot's embodiment is considered for producing detailed and safe trajectories of $1$ $cm$ resolution. The proposed method has been evaluated with our mobile robot in several outdoor scenarios revealing remarkable performance.