Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgeskrl: Modular and Flexible Library for Reinforcement Learning
Feb 08, 2022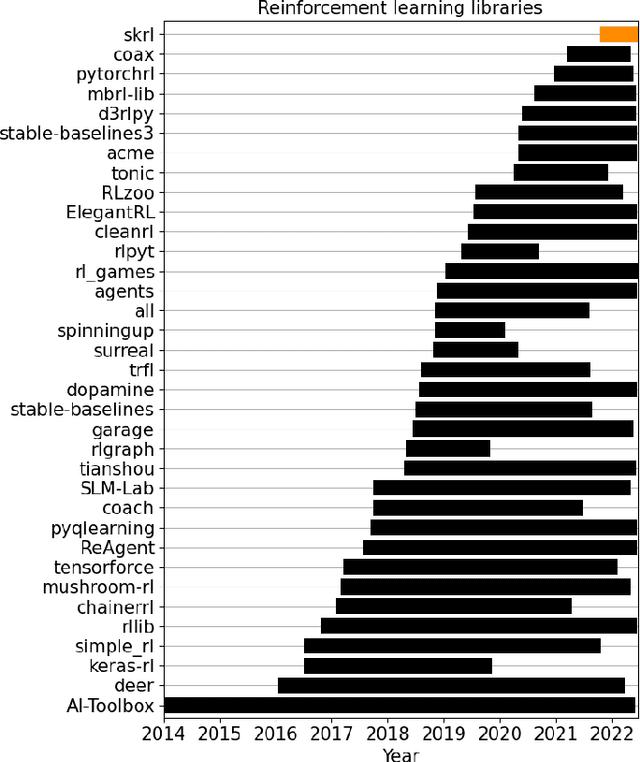
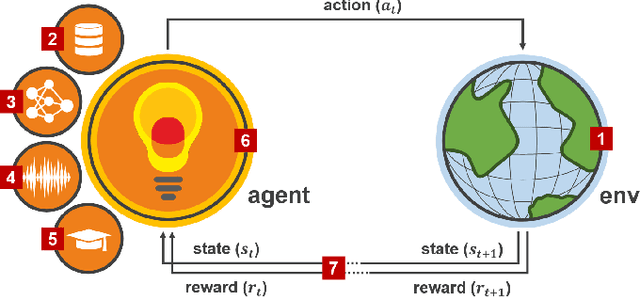
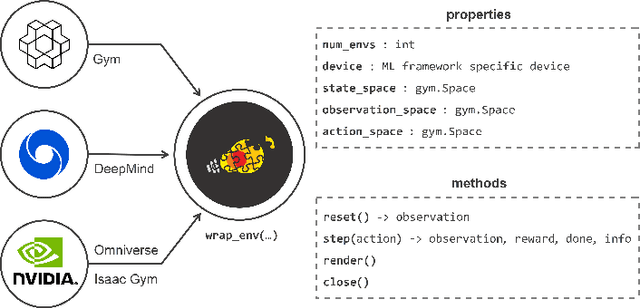
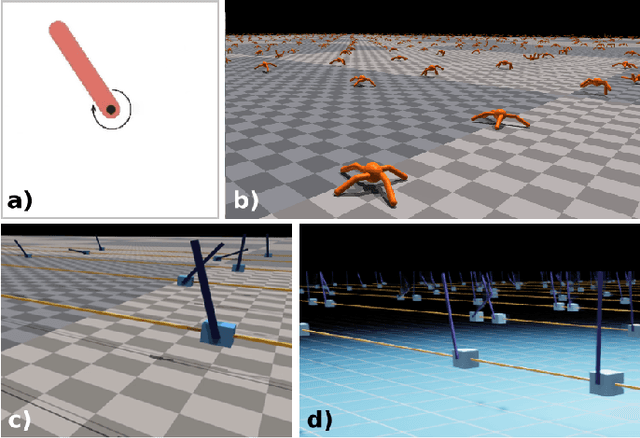
skrl is an open-source modular library for reinforcement learning written in Python and designed with a focus on readability, simplicity, and transparency of algorithm implementations. Apart from supporting environments that use the traditional OpenAI Gym interface, it allows loading, configuring, and operating NVIDIA Isaac Gym environments, enabling the parallel training of several agents with adjustable scopes, which may or may not share resources, in the same execution. The library's documentation can be found at https://skrl.readthedocs.io and its source code is available on GitHub at url{https://github.com/Toni-SM/skrl.
* 6 pages, 7 figures
Via