 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Maps Registration and Path Planning for Autonomous Robot Navigation
Paper and Code
Dec 10, 2013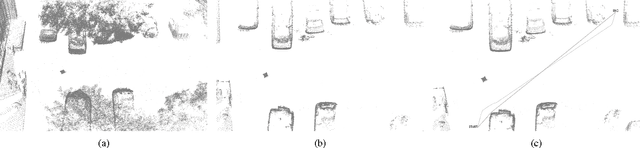


Mobile robots dedicated in security tasks should be capable of clearly perceiving their environment to competently navigate within cluttered areas, so as to accomplish their assigned mission. The paper in hand describes such an autonomous agent designed to deploy competently in hazardous environments equipped with a laser scanner sensor. During the robot's motion, consecutive scans are obtained to produce dense 3D maps of the area. A 3D point cloud registration technique is exploited to merge the successively created maps during the robot's motion followed by an ICP refinement step. The reconstructed 3D area is then top-down projected with great resolution, to be fed in a path planning algorithm suitable to trace obstacle-free trajectories in the explored area. The main characteristic of the path planner is that the robot's embodiment is considered for producing detailed and safe trajectories of $1$ $cm$ resolution. The proposed method has been evaluated with our mobile robot in several outdoor scenarios revealing remarkable performance.