 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderstanding Deep Convolutional Networks through Gestalt Theory
Oct 19, 2018
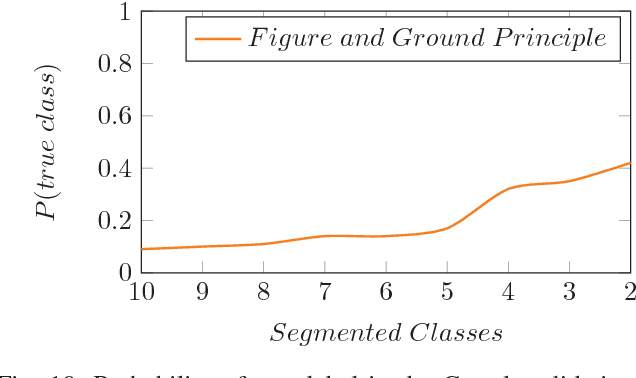
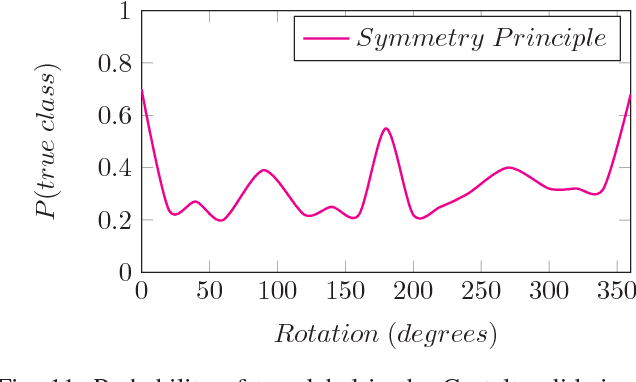

The superior performance of deep convolutional networks over high-dimensional problems have made them very popular for several applications. Despite their wide adoption, their underlying mechanisms still remain unclear with their improvement procedures still relying mainly on a trial and error process. We introduce a novel sensitivity analysis based on the Gestalt theory for giving insights into the classifier function and intermediate layers. Since Gestalt psychology stipulates that perception can be a product of complex interactions among several elements, we perform an ablation study based on this concept to discover which principles and image context significantly contribute in the network classification. Our results reveal that ConvNets follow most of the visual cortical perceptual mechanisms defined by the Gestalt principles at several levels. The proposed framework stimulates specific feature maps in classification problems and reveal important network attributes that can produce more explainable network models.
3D Maps Registration and Path Planning for Autonomous Robot Navigation
Dec 10, 2013


Mobile robots dedicated in security tasks should be capable of clearly perceiving their environment to competently navigate within cluttered areas, so as to accomplish their assigned mission. The paper in hand describes such an autonomous agent designed to deploy competently in hazardous environments equipped with a laser scanner sensor. During the robot's motion, consecutive scans are obtained to produce dense 3D maps of the area. A 3D point cloud registration technique is exploited to merge the successively created maps during the robot's motion followed by an ICP refinement step. The reconstructed 3D area is then top-down projected with great resolution, to be fed in a path planning algorithm suitable to trace obstacle-free trajectories in the explored area. The main characteristic of the path planner is that the robot's embodiment is considered for producing detailed and safe trajectories of $1$ $cm$ resolution. The proposed method has been evaluated with our mobile robot in several outdoor scenarios revealing remarkable performance.