 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSatisficing and Optimal Generalised Planning via Goal Regression (Extended Version)
Nov 14, 2025Generalised planning (GP) refers to the task of synthesising programs that solve families of related planning problems. We introduce a novel, yet simple method for GP: given a set of training problems, for each problem, compute an optimal plan for each goal atom in some order, perform goal regression on the resulting plans, and lift the corresponding outputs to obtain a set of first-order $\textit{Condition} \rightarrow \textit{Actions}$ rules. The rules collectively constitute a generalised plan that can be executed as is or alternatively be used to prune the planning search space. We formalise and prove the conditions under which our method is guaranteed to learn valid generalised plans and state space pruning axioms for search. Experiments demonstrate significant improvements over state-of-the-art (generalised) planners with respect to the 3 metrics of synthesis cost, planning coverage, and solution quality on various classical and numeric planning domains.
Relational GNNs Cannot Learn $C_2$ Features for Planning
Jun 13, 2025
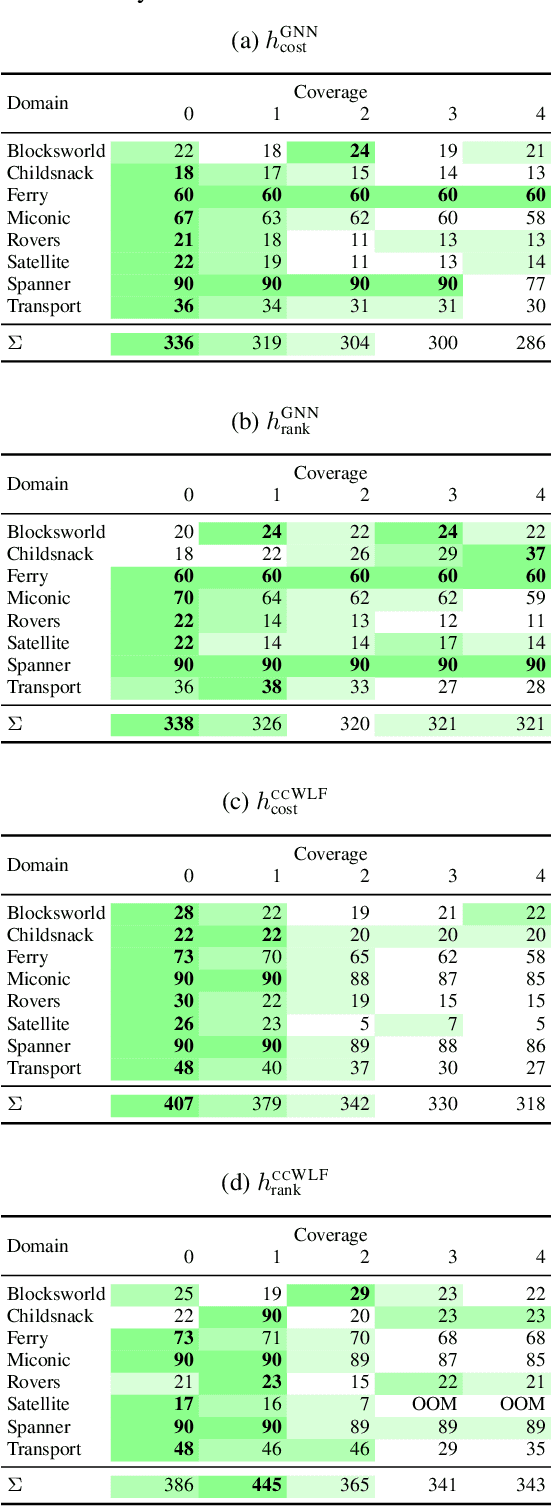
Relational Graph Neural Networks (R-GNNs) are a GNN-based approach for learning value functions that can generalise to unseen problems from a given planning domain. R-GNNs were theoretically motivated by the well known connection between the expressive power of GNNs and $C_2$, first-order logic with two variables and counting. In the context of planning, $C_2$ features refer to the set of formulae in $C_2$ with relations defined by the unary and binary predicates of a planning domain. Some planning domains exhibit optimal value functions that can be decomposed as arithmetic expressions of $C_2$ features. We show that, contrary to empirical results, R-GNNs cannot learn value functions defined by $C_2$ features. We also identify prior GNN architectures for planning that may better learn value functions defined by $C_2$ features.
AI Planning: A Primer and Survey (Preliminary Report)
Dec 07, 2024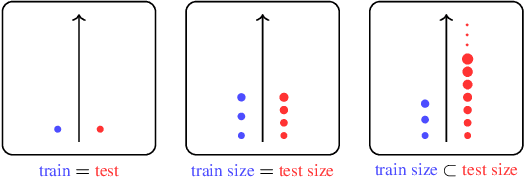
Automated decision-making is a fundamental topic that spans multiple sub-disciplines in AI: reinforcement learning (RL), AI planning (AP), foundation models, and operations research, among others. Despite recent efforts to ``bridge the gaps'' between these communities, there remain many insights that have not yet transcended the boundaries. Our goal in this paper is to provide a brief and non-exhaustive primer on ideas well-known in AP, but less so in other sub-disciplines. We do so by introducing the classical AP problem and representation, and extensions that handle uncertainty and time through the Markov Decision Process formalism. Next, we survey state-of-the-art techniques and ideas for solving AP problems, focusing on their ability to exploit problem structure. Lastly, we cover subfields within AP for learning structure from unstructured inputs and learning to generalise to unseen scenarios and situations.
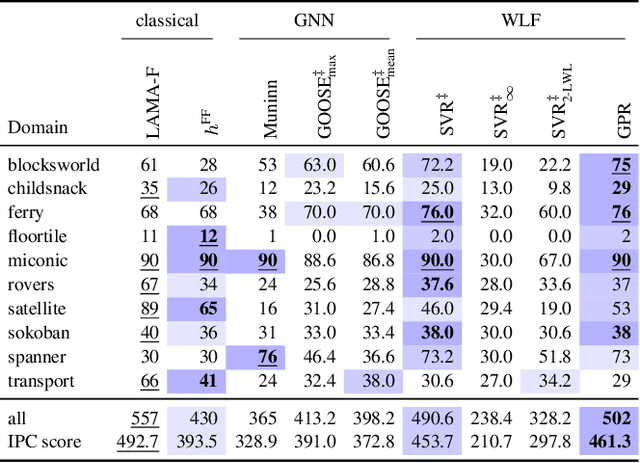
Graph Learning for Planning: The Story Thus Far and Open Challenges
Dec 03, 2024



Graph learning is naturally well suited for use in planning due to its ability to exploit relational structures exhibited in planning domains and to take as input planning instances with arbitrary number of objects. In this paper, we study the usage of graph learning for planning thus far by studying the theoretical and empirical effects on learning and planning performance of (1) graph representations of planning tasks, (2) graph learning architectures, and (3) optimisation formulations for learning. Our studies accumulate in the GOOSE framework which learns domain knowledge from small planning tasks in order to scale up to much larger planning tasks. In this paper, we also highlight and propose the 5 open challenges in the general Learning for Planning field that we believe need to be addressed for advancing the state-of-the-art.
WLPlan: Relational Features for Symbolic Planning
Nov 01, 2024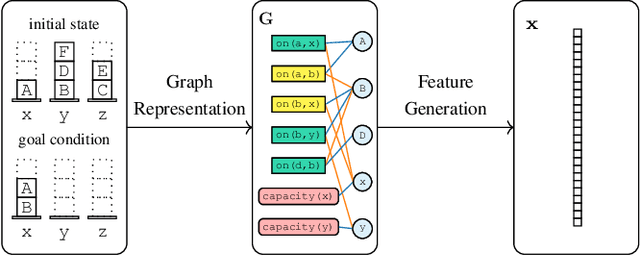



Scalable learning for planning research generally involves juggling between different programming languages for handling learning and planning modules effectively. Interpreted languages such as Python are commonly used for learning routines due to their ease of use and the abundance of highly maintained learning libraries they exhibit, while compiled languages such as C++ are used for planning routines due to their optimised resource usage. Motivated by the need for tools for developing scalable learning planners, we introduce WLPlan, a C++ package with Python bindings which implements recent promising work for automatically generating relational features of planning tasks. Such features can be used for any downstream routine, such as learning domain control knowledge or probing and understanding planning tasks. More specifically, WLPlan provides functionality for (1) transforming planning tasks into graphs, and (2) embedding planning graphs into feature vectors via graph kernels. The source code and instructions for the installation and usage of WLPlan are available at tinyurl.com/42kymswc
Graph Learning for Numeric Planning
Oct 31, 2024

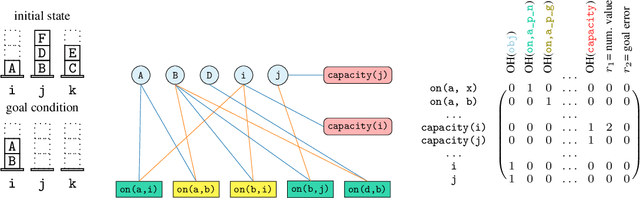
Graph learning is naturally well suited for use in symbolic, object-centric planning due to its ability to exploit relational structures exhibited in planning domains and to take as input planning instances with arbitrary numbers of objects. Numeric planning is an extension of symbolic planning in which states may now also exhibit numeric variables. In this work, we propose data-efficient and interpretable machine learning models for learning to solve numeric planning tasks. This involves constructing a new graph kernel for graphs with both continuous and categorical attributes, as well as new optimisation methods for learning heuristic functions for numeric planning. Experiments show that our graph kernels are vastly more efficient and generalise better than graph neural networks for numeric planning, and also yield competitive coverage performance compared to domain-independent numeric planners. Code is available at https://github.com/DillonZChen/goose
Deep Learning for Generalised Planning with Background Knowledge
Oct 10, 2024
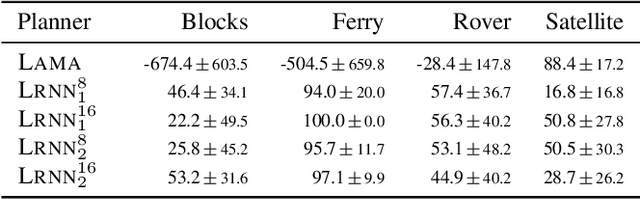


Automated planning is a form of declarative problem solving which has recently drawn attention from the machine learning (ML) community. ML has been applied to planning either as a way to test `reasoning capabilities' of architectures, or more pragmatically in an attempt to scale up solvers with learned domain knowledge. In practice, planning problems are easy to solve but hard to optimise. However, ML approaches still struggle to solve many problems that are often easy for both humans and classical planners. In this paper, we thus propose a new ML approach that allows users to specify background knowledge (BK) through Datalog rules to guide both the learning and planning processes in an integrated fashion. By incorporating BK, our approach bypasses the need to relearn how to solve problems from scratch and instead focuses the learning on plan quality optimisation. Experiments with BK demonstrate that our method successfully scales and learns to plan efficiently with high quality solutions from small training data generated in under 5 seconds.
Novelty Heuristics, Multi-Queue Search, and Portfolios for Numeric Planning
Apr 11, 2024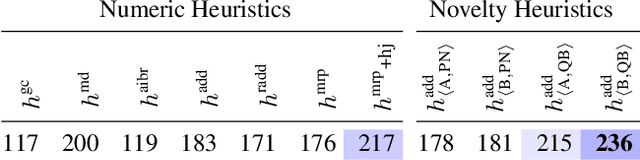



Heuristic search is a powerful approach for solving planning problems and numeric planning is no exception. In this paper, we boost the performance of heuristic search for numeric planning with various powerful techniques orthogonal to improving heuristic informedness: numeric novelty heuristics, the Manhattan distance heuristic, and exploring the use of multi-queue search and portfolios for combining heuristics.
Return to Tradition: Learning Reliable Heuristics with Classical Machine Learning
Mar 25, 2024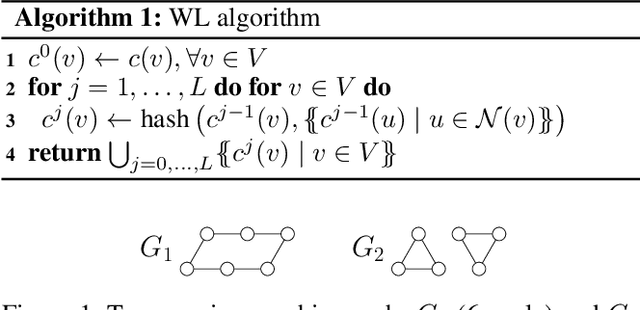
Current approaches for learning for planning have yet to achieve competitive performance against classical planners in several domains, and have poor overall performance. In this work, we construct novel graph representations of lifted planning tasks and use the WL algorithm to generate features from them. These features are used with classical machine learning methods which have up to 2 orders of magnitude fewer parameters and train up to 3 orders of magnitude faster than the state-of-the-art deep learning for planning models. Our novel approach, WL-GOOSE, reliably learns heuristics from scratch and outperforms the $h^{\text{FF}}$ heuristic in a fair competition setting. It also outperforms or ties with LAMA on 4 out of 10 domains on coverage and 7 out of 10 domains on plan quality. WL-GOOSE is the first learning for planning model which achieves these feats. Furthermore, we study the connections between our novel WL feature generation method, previous theoretically flavoured learning architectures, and Description Logic Features for planning.
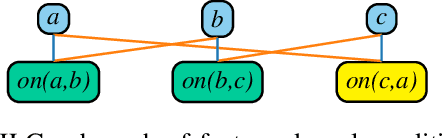
Learning Domain-Independent Heuristics for Grounded and Lifted Planning
Dec 20, 2023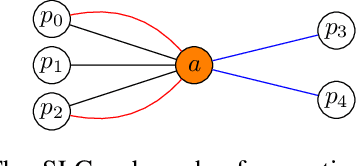
We present three novel graph representations of planning tasks suitable for learning domain-independent heuristics using Graph Neural Networks (GNNs) to guide search. In particular, to mitigate the issues caused by large grounded GNNs we present the first method for learning domain-independent heuristics with only the lifted representation of a planning task. We also provide a theoretical analysis of the expressiveness of our models, showing that some are more powerful than STRIPS-HGN, the only other existing model for learning domain-independent heuristics. Our experiments show that our heuristics generalise to much larger problems than those in the training set, vastly surpassing STRIPS-HGN heuristics.