 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmooth Total variation Regularization for Interference Detection and Elimination (STRIDE) for MRI
Nov 17, 2025MRI is increasingly desired to function near electronic devices that emit potentially dynamic electromagnetic interference (EMI). To accommodate for this, we propose the STRIDE method, which improves on previous external-sensor-based EMI removal methods by exploiting inherent MR image smoothness in its total variation. STRIDE measures data from both EMI detectors and primary MR imaging coils, transforms this data into the image domain, and for each column of the resulting image array, combines and subtracts data from the EMI detectors in a way that optimizes for total-variation smoothness. Performance was tested on phantom and in-vivo datasets with a 0.5T scanner. STRIDE resulted in visually better EMI removal, higher temporal SNR, larger EMI removal percentage, and lower RMSE than standard implementations. STRIDE is a robust technique that leverages inherent MR image properties to provide improved EMI removal performance over standard algorithms, particularly for time-varying noise sources.
Ontology Matching with Large Language Models and Prioritized Depth-First Search
Jan 20, 2025



Ontology matching (OM) plays a key role in enabling data interoperability and knowledge sharing, but it remains challenging due to the need for large training datasets and limited vocabulary processing in machine learning approaches. Recently, methods based on Large Language Model (LLMs) have shown great promise in OM, particularly through the use of a retrieve-then-prompt pipeline. In this approach, relevant target entities are first retrieved and then used to prompt the LLM to predict the final matches. Despite their potential, these systems still present limited performance and high computational overhead. To address these issues, we introduce MILA, a novel approach that embeds a retrieve-identify-prompt pipeline within a prioritized depth-first search (PDFS) strategy. This approach efficiently identifies a large number of semantic correspondences with high accuracy, limiting LLM requests to only the most borderline cases. We evaluated MILA using the biomedical challenge proposed in the 2023 and 2024 editions of the Ontology Alignment Evaluation Initiative. Our method achieved the highest F-Measure in four of the five unsupervised tasks, outperforming state-of-the-art OM systems by up to 17%. It also performed better than or comparable to the leading supervised OM systems. MILA further exhibited task-agnostic performance, remaining stable across all tasks and settings, while significantly reducing LLM requests. These findings highlight that high-performance LLM-based OM can be achieved through a combination of programmed (PDFS), learned (embedding vectors), and prompting-based heuristics, without the need of domain-specific heuristics or fine-tuning.
Towards Personalized Preprocessing Pipeline Search
Feb 28, 2023



Feature preprocessing, which transforms raw input features into numerical representations, is a crucial step in automated machine learning (AutoML) systems. However, the existing systems often have a very small search space for feature preprocessing with the same preprocessing pipeline applied to all the numerical features. This may result in sub-optimal performance since different datasets often have various feature characteristics, and features within a dataset may also have their own preprocessing preferences. To bridge this gap, we explore personalized preprocessing pipeline search, where the search algorithm is allowed to adopt a different preprocessing pipeline for each feature. This is a challenging task because the search space grows exponentially with more features. To tackle this challenge, we propose ClusterP3S, a novel framework for Personalized Preprocessing Pipeline Search via Clustering. The key idea is to learn feature clusters such that the search space can be significantly reduced by using the same preprocessing pipeline for the features within a cluster. To this end, we propose a hierarchical search strategy to jointly learn the clusters and search for the optimal pipelines, where the upper-level search optimizes the feature clustering to enable better pipelines built upon the clusters, and the lower-level search optimizes the pipeline given a specific cluster assignment. We instantiate this idea with a deep clustering network that is trained with reinforcement learning at the upper level, and random search at the lower level. Experiments on benchmark classification datasets demonstrate the effectiveness of enabling feature-wise preprocessing pipeline search.
Deep reinforcement learning oriented for real world dynamic scenarios
Oct 20, 2022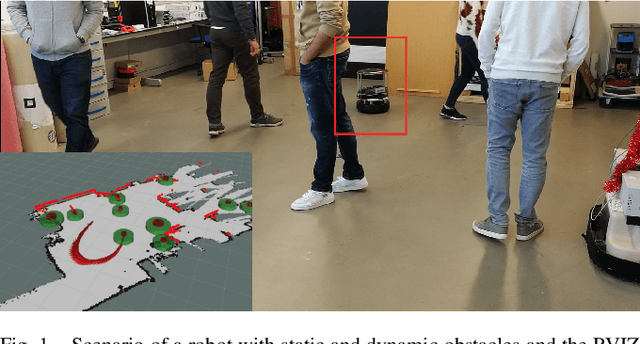
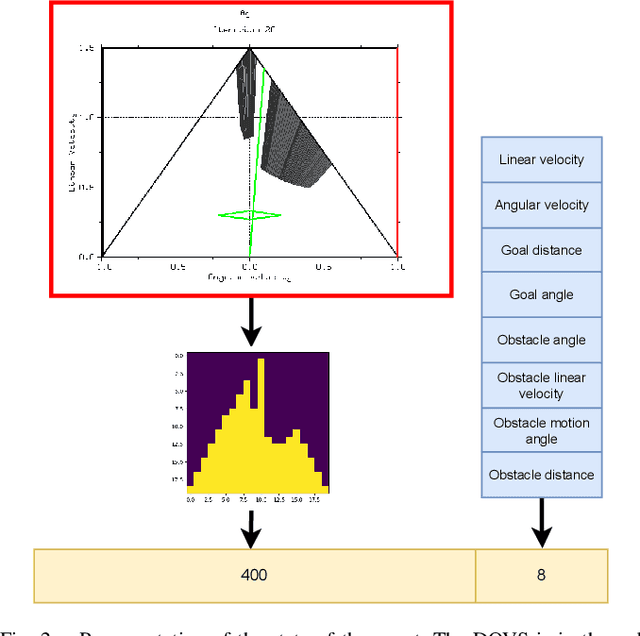
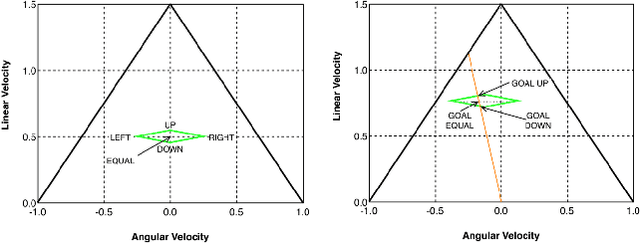
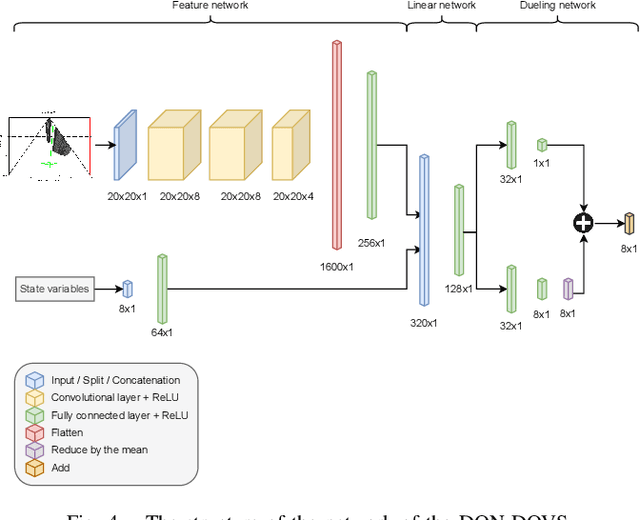
Autonomous navigation in dynamic environments is a complex but essential task for autonomous robots. Recent deep reinforcement learning approaches show promising results to solve the problem, but it is not solved yet, as they typically assume no robot kinodynamic restrictions, holonomic movement or perfect environment knowledge. Moreover, most algorithms fail in the real world due to the inability to generate real-world training data for the huge variability of possible scenarios. In this work, we present a novel planner, DQN-DOVS, that uses deep reinforcement learning on a descriptive robocentric velocity space model to navigate in highly dynamic environments. It is trained using a smart curriculum learning approach on a simulator that faithfully reproduces the real world, reducing the gap between the reality and simulation. We test the resulting algorithm in scenarios with different number of obstacles and compare it with many state-of-the-art approaches, obtaining a better performance. Finally, we try the algorithm in a ground robot, using the same setup as in the simulation experiments.
TODS: An Automated Time Series Outlier Detection System
Sep 18, 2020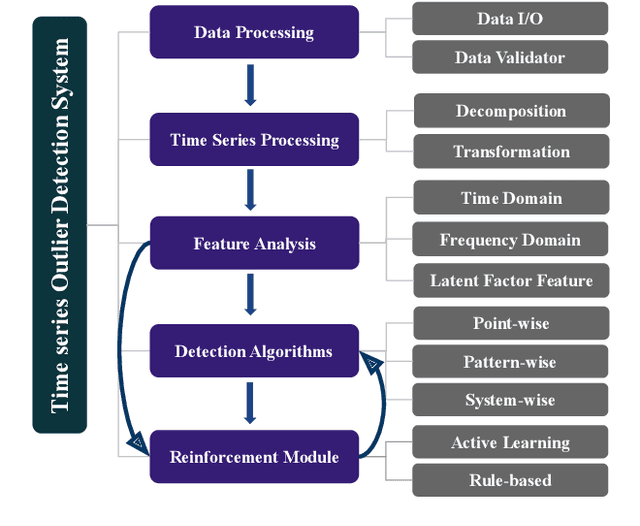
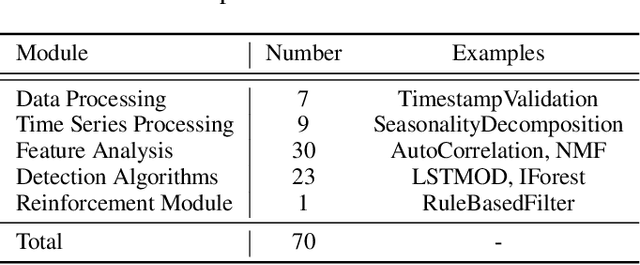
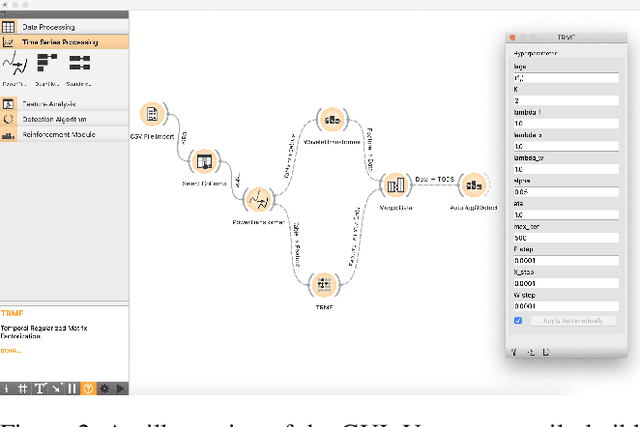
We present TODS, an automated Time Series Outlier Detection System for research and industrial applications. TODS is a highly modular system that supports easy pipeline construction. The basic building block of TODS is primitive, which is an implementation of a function with hyperparameters. TODS currently supports 70 primitives, including data processing, time series processing, feature analysis, detection algorithms, and a reinforcement module. Users can freely construct a pipeline using these primitives and perform end- to-end outlier detection with the constructed pipeline. TODS provides a Graphical User Interface (GUI), where users can flexibly design a pipeline with drag-and-drop. Moreover, a data-driven searcher is provided to automatically discover the most suitable pipelines given a dataset. TODS is released under Apache 2.0 license at https://github.com/datamllab/tods.