 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLESS is More: Rethinking Probabilistic Models of Human Behavior
Jan 13, 2020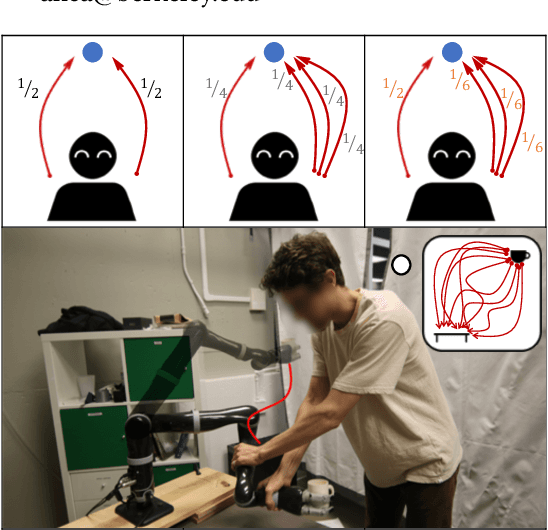
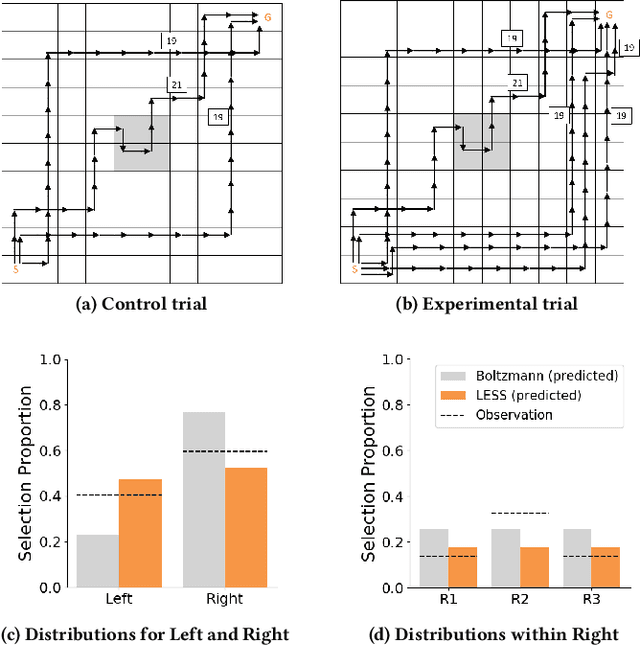

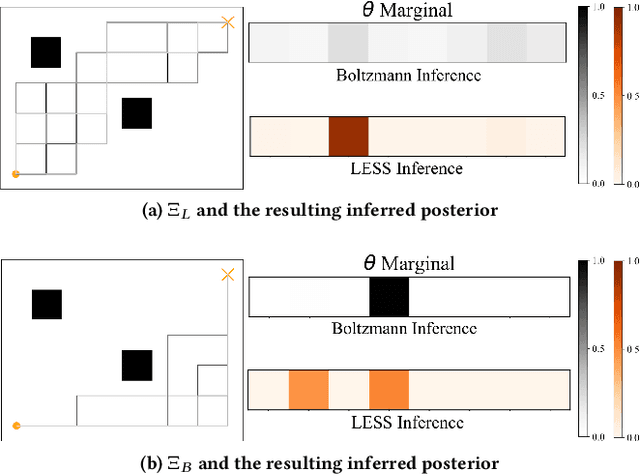
Robots need models of human behavior for both inferring human goals and preferences, and predicting what people will do. A common model is the Boltzmann noisily-rational decision model, which assumes people approximately optimize a reward function and choose trajectories in proportion to their exponentiated reward. While this model has been successful in a variety of robotics domains, its roots lie in econometrics, and in modeling decisions among different discrete options, each with its own utility or reward. In contrast, human trajectories lie in a continuous space, with continuous-valued features that influence the reward function. We propose that it is time to rethink the Boltzmann model, and design it from the ground up to operate over such trajectory spaces. We introduce a model that explicitly accounts for distances between trajectories, rather than only their rewards. Rather than each trajectory affecting the decision independently, similar trajectories now affect the decision together. We start by showing that our model better explains human behavior in a user study. We then analyze the implications this has for robot inference, first in toy environments where we have ground truth and find more accurate inference, and finally for a 7DOF robot arm learning from user demonstrations.
Maximum Likelihood Constraint Inference for Inverse Reinforcement Learning
Sep 12, 2019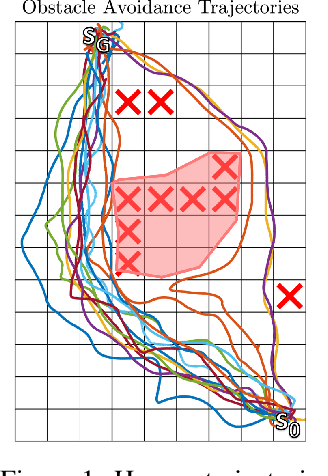
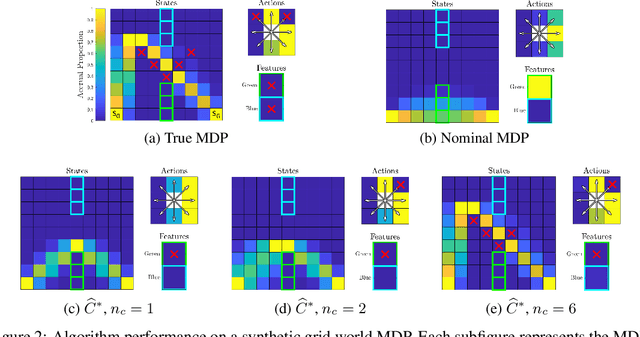
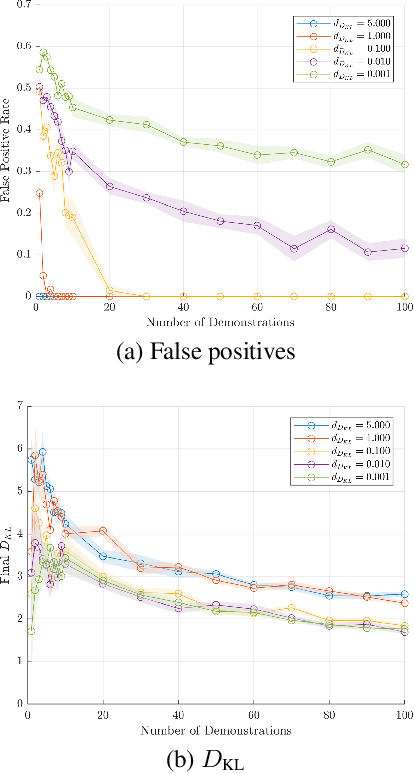
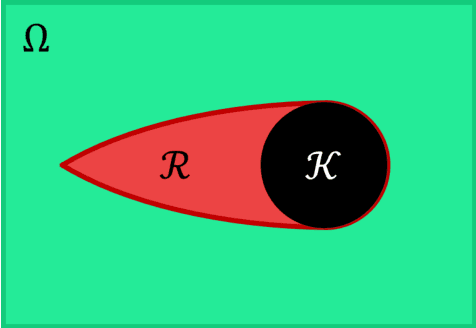
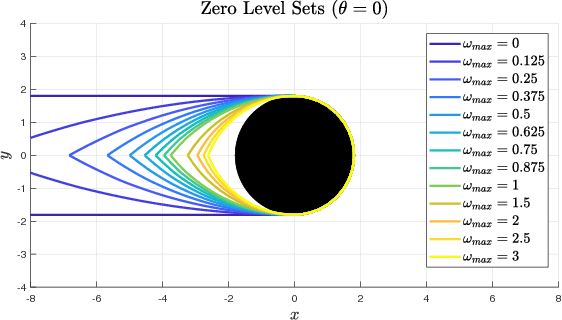
While most approaches to the problem of Inverse Reinforcement Learning (IRL) focus on estimating a reward function that best explains an expert agent's policy or demonstrated behavior on a control task, it is often the case that such behavior is more succinctly described by a simple reward combined with a set of hard constraints. In this setting, the agent is attempting to maximize cumulative rewards subject to these given constraints on their behavior. We reformulate the problem of IRL on Markov Decision Processes (MDPs) such that, given a nominal model of the environment and a nominal reward function, we seek to estimate state, action, and feature constraints in the environment that motivate an agent's behavior. Our approach is based on the Maximum Entropy IRL framework, which allows us to reason about the likelihood of an expert agent's demonstrations given our knowledge of an MDP. Using our method, we can infer which constraints can be added to the MDP to most increase the likelihood of observing these demonstrations. We present an algorithm which iteratively infers the Maximum Likelihood Constraint to best explain observed behavior, and we evaluate its efficacy using both simulated behavior and recorded data of humans navigating around an obstacle.
Modeling Supervisor Safe Sets for Improving Collaboration in Human-Robot Teams
May 09, 2018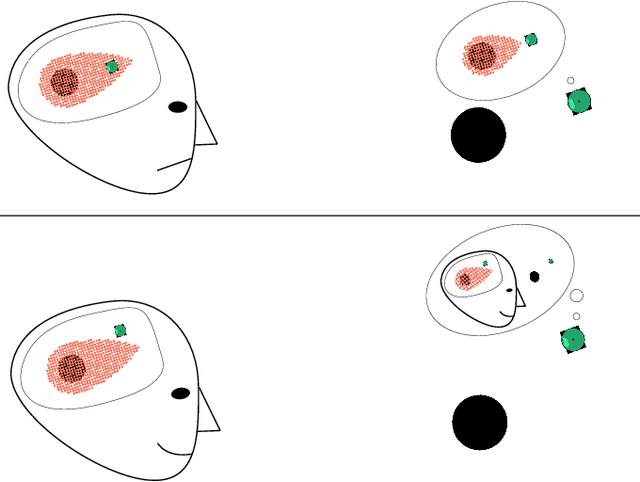
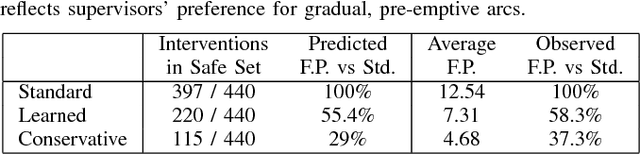
When a human supervisor collaborates with a team of robots, their attention is divided and cognitive resources are at a premium. We aim to optimize the distribution of these resources and the flow of attention. To this end, we propose the model of an idealized supervisor to describe human behavior. Such a supervisor employs a potentially inaccurate internal model of the the robots' dynamics to judge safety. We represent these safety judgements by constructing a safe set from this internal model using reachability theory. When a robot leaves this safe set, the idealized supervisor will intervene to assist, regardless of whether or not the robot remains objectively safe. False positives, where a human supervisor incorrectly judges a robot to be in danger, needlessly consume supervisor attention. In this work, we propose a method that decreases false positives by learning the supervisor's safe set and using that information to govern robot behavior. We prove that robots behaving according to our approach will reduce the occurrence of false positives for our idealized supervisor model. Furthermore, we empirically validate our approach with a user study that demonstrates a significant ($p = 0.0328$) reduction in false positives for our method compared to a baseline safety controller.