 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Cooperation-Aware Lane Change Method for Autonomous Vehicles
Jan 26, 2022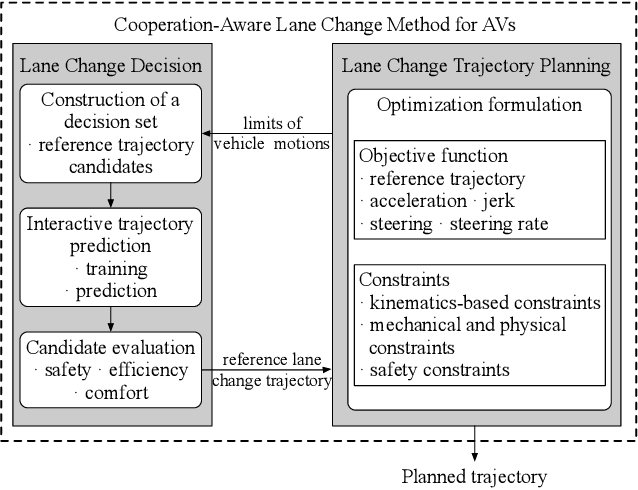
Lane change for autonomous vehicles (AVs) is an important but challenging task in complex dynamic traffic environments. Due to difficulties in guarantee safety as well as a high efficiency, AVs are inclined to choose relatively conservative strategies for lane change. To avoid the conservatism, this paper presents a cooperation-aware lane change method utilizing interactions between vehicles. We first propose an interactive trajectory prediction method to explore possible cooperations between an AV and the others. Further, an evaluation is designed to make a decision on lane change, in which safety, efficiency and comfort are taken into consideration. Thereafter, we propose a motion planning algorithm based on model predictive control (MPC), which incorporates AV's decision and surrounding vehicles' interactive behaviors into constraints so as to avoid collisions during lane change. Quantitative testing results show that compared with the methods without an interactive prediction, our method enhances driving efficiencies of the AV and other vehicles by 14.8$\%$ and 2.6$\%$ respectively, which indicates that a proper utilization of vehicle interactions can effectively reduce the conservatism of the AV and promote the cooperation between the AV and others.
Graph-Based Spatial-Temporal Convolutional Network for Vehicle Trajectory Prediction in Autonomous Driving
Sep 27, 2021



Forecasting the trajectories of neighbor vehicles is a crucial step for decision making and motion planning of autonomous vehicles. This paper proposes a graph-based spatial-temporal convolutional network (GSTCN) to predict future trajectory distributions of all neighbor vehicles using past trajectories. This network tackles the spatial interactions using a graph convolutional network (GCN), and captures the temporal features with a convolutional neural network (CNN). The spatial-temporal features are encoded and decoded by a gated recurrent unit (GRU) network to generate future trajectory distributions. Besides, we propose a weighted adjacency matrix to describe the intensities of mutual influence between vehicles, and the ablation study demonstrates the effectiveness of our proposed scheme. Our network is evaluated on two real-world freeway trajectory datasets: I-80 and US-101 in the Next Generation Simulation (NGSIM).Comparisons in three aspects, including prediction errors, model sizes, and inference speeds, show that our network can achieve state-of-the-art performance.
Multi-view metric learning for multi-instance image classification
Oct 21, 2016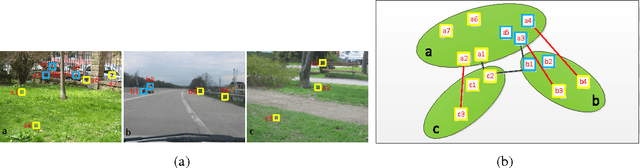

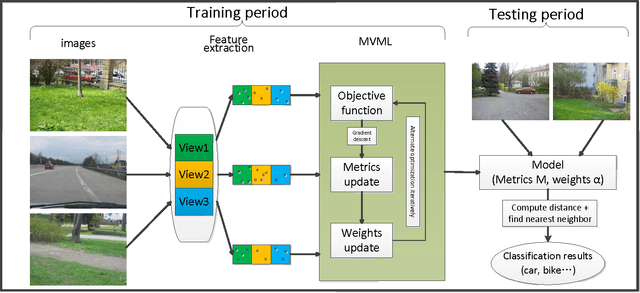

It is critical and meaningful to make image classification since it can help human in image retrieval and recognition, object detection, etc. In this paper, three-sides efforts are made to accomplish the task. First, visual features with bag-of-words representation, not single vector, are extracted to characterize the image. To improve the performance, the idea of multi-view learning is implemented and three kinds of features are provided, each one corresponds to a single view. The information from three views is complementary to each other, which can be unified together. Then a new distance function is designed for bags by computing the weighted sum of the distances between instances. The technique of metric learning is explored to construct a data-dependent distance metric to measure the relationships between instances, meanwhile between bags and images, more accurately. Last, a novel approach, called MVML, is proposed, which optimizes the joint probability that every image is similar with its nearest image. MVML learns multiple distance metrics, each one models a single view, to unifies the information from multiple views. The method can be solved by alternate optimization iteratively. Gradient ascent and positive semi-definite projection are utilized in the iterations. Distance comparisons verified that the new bag distance function is prior to previous functions. In model evaluation, numerical experiments show that MVML with multiple views performs better than single view condition, which demonstrates that our model can assemble the complementary information efficiently and measure the distance between images more precisely. Experiments on influence of parameters and instance number validate the consistency of the method.