 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph-Based Spatial-Temporal Convolutional Network for Vehicle Trajectory Prediction in Autonomous Driving
Sep 27, 2021



Forecasting the trajectories of neighbor vehicles is a crucial step for decision making and motion planning of autonomous vehicles. This paper proposes a graph-based spatial-temporal convolutional network (GSTCN) to predict future trajectory distributions of all neighbor vehicles using past trajectories. This network tackles the spatial interactions using a graph convolutional network (GCN), and captures the temporal features with a convolutional neural network (CNN). The spatial-temporal features are encoded and decoded by a gated recurrent unit (GRU) network to generate future trajectory distributions. Besides, we propose a weighted adjacency matrix to describe the intensities of mutual influence between vehicles, and the ablation study demonstrates the effectiveness of our proposed scheme. Our network is evaluated on two real-world freeway trajectory datasets: I-80 and US-101 in the Next Generation Simulation (NGSIM).Comparisons in three aspects, including prediction errors, model sizes, and inference speeds, show that our network can achieve state-of-the-art performance.
Power Plant Performance Modeling with Concept Drift
Oct 19, 2017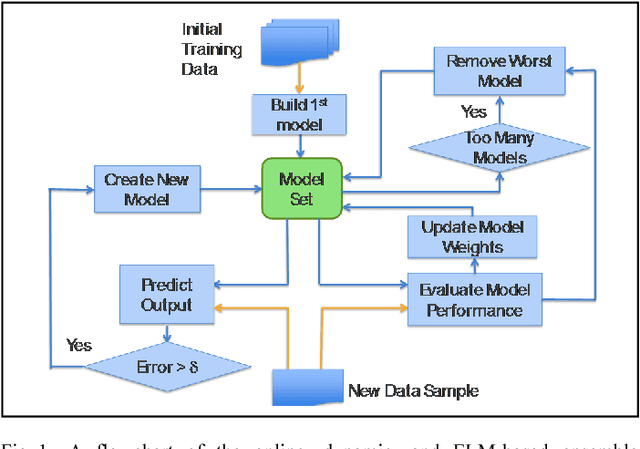

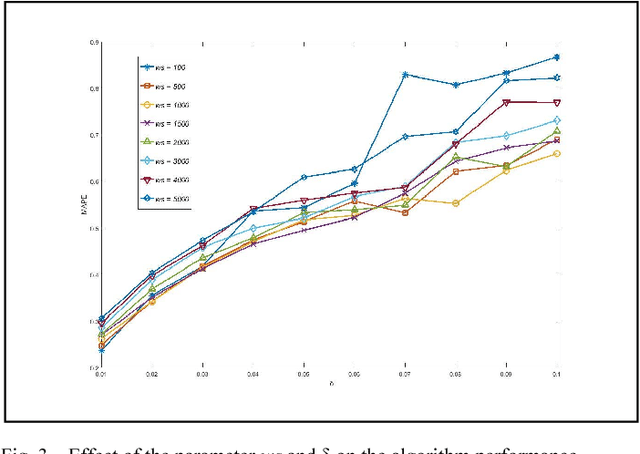

Power plant is a complex and nonstationary system for which the traditional machine learning modeling approaches fall short of expectations. The ensemble-based online learning methods provide an effective way to continuously learn from the dynamic environment and autonomously update models to respond to environmental changes. This paper proposes such an online ensemble regression approach to model power plant performance, which is critically important for operation optimization. The experimental results on both simulated and real data show that the proposed method can achieve performance with less than 1% mean average percentage error, which meets the general expectations in field operations.
Concept Drift Learning with Alternating Learners
Oct 18, 2017Data-driven predictive analytics are in use today across a number of industrial applications, but further integration is hindered by the requirement of similarity among model training and test data distributions. This paper addresses the need of learning from possibly nonstationary data streams, or under concept drift, a commonly seen phenomenon in practical applications. A simple dual-learner ensemble strategy, alternating learners framework, is proposed. A long-memory model learns stable concepts from a long relevant time window, while a short-memory model learns transient concepts from a small recent window. The difference in prediction performance of these two models is monitored and induces an alternating policy to select, update and reset the two models. The method features an online updating mechanism to maintain the ensemble accuracy, and a concept-dependent trigger to focus on relevant data. Through empirical studies the method demonstrates effective tracking and prediction when the steaming data carry abrupt and/or gradual changes.