 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantifying Accuracy of an Event-Based Star Tracker via Earth's Rotation
Sep 10, 2025Event-based cameras (EBCs) are a promising new technology for star tracking-based attitude determination, but prior studies have struggled to determine accurate ground truth for real data. We analyze the accuracy of an EBC star tracking system utilizing the Earth's motion as the ground truth for comparison. The Earth rotates in a regular way with very small irregularities which are measured to the level of milli-arcseconds. By keeping an event camera static and pointing it through a ground-based telescope at the night sky, we create a system where the only camera motion in the celestial reference frame is that induced by the Earth's rotation. The resulting event stream is processed to generate estimates of orientation which we compare to the International Earth Rotation and Reference System (IERS) measured orientation of the Earth. The event camera system is able to achieve a root mean squared across error of 18.47 arcseconds and an about error of 78.84 arcseconds. Combined with the other benefits of event cameras over framing sensors (reduced computation due to sparser data streams, higher dynamic range, lower energy consumption, faster update rates), this level of accuracy suggests the utility of event cameras for low-cost and low-latency star tracking. We provide all code and data used to generate our results: https://gitlab.kitware.com/nest-public/telescope_accuracy_quantification.
EBS-EKF: Accurate and High Frequency Event-based Star Tracking
Mar 25, 2025
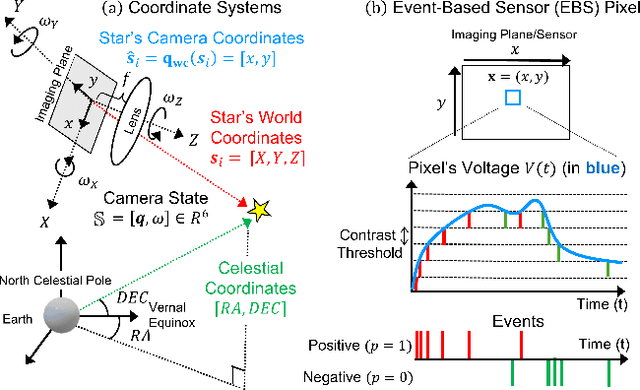

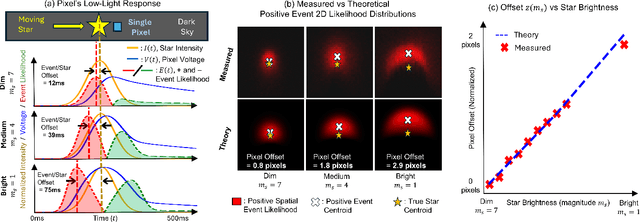
Event-based sensors (EBS) are a promising new technology for star tracking due to their low latency and power efficiency, but prior work has thus far been evaluated exclusively in simulation with simplified signal models. We propose a novel algorithm for event-based star tracking, grounded in an analysis of the EBS circuit and an extended Kalman filter (EKF). We quantitatively evaluate our method using real night sky data, comparing its results with those from a space-ready active-pixel sensor (APS) star tracker. We demonstrate that our method is an order-of-magnitude more accurate than existing methods due to improved signal modeling and state estimation, while providing more frequent updates and greater motion tolerance than conventional APS trackers. We provide all code and the first dataset of events synchronized with APS solutions.
xFBD: Focused Building Damage Dataset and Analysis
Jan 03, 2023



The xView2 competition and xBD dataset spurred significant advancements in overhead building damage detection, but the competition's pixel level scoring can lead to reduced solution performance in areas with tight clusters of buildings or uninformative context. We seek to advance automatic building damage assessment for disaster relief by proposing an auxiliary challenge to the original xView2 competition. This new challenge involves a new dataset and metrics indicating solution performance when damage is more local and limited than in xBD. Our challenge measures a network's ability to identify individual buildings and their damage level without excessive reliance on the buildings' surroundings. Methods that succeed on this challenge will provide more fine-grained, precise damage information than original xView2 solutions. The best-performing xView2 networks' performances dropped noticeably in our new limited/local damage detection task. The common causes of failure observed are that (1) building objects and their classifications are not separated well, and (2) when they are, the classification is strongly biased by surrounding buildings and other damage context. Thus, we release our augmented version of the dataset with additional object-level scoring metrics https://gitlab.kitware.com/dennis.melamed/xfbd to test independence and separability of building objects, alongside the pixel-level performance metrics of the original competition. We also experiment with new baseline models which improve independence and separability of building damage predictions. Our results indicate that building damage detection is not a fully-solved problem, and we invite others to use and build on our dataset augmentations and metrics.
Learnable Spatio-Temporal Map Embeddings for Deep Inertial Localization
Nov 14, 2022



Indoor localization systems often fuse inertial odometry with map information via hand-defined methods to reduce odometry drift, but such methods are sensitive to noise and struggle to generalize across odometry sources. To address the robustness problem in map utilization, we propose a data-driven prior on possible user locations in a map by combining learned spatial map embeddings and temporal odometry embeddings. Our prior learns to encode which map regions are feasible locations for a user more accurately than previous hand-defined methods. This prior leads to a 49% improvement in inertial-only localization accuracy when used in a particle filter. This result is significant, as it shows that our relative positioning method can match the performance of absolute positioning using bluetooth beacons. To show the generalizability of our method, we also show similar improvements using wheel encoder odometry.
IDOL: Inertial Deep Orientation-Estimation and Localization
Feb 08, 2021
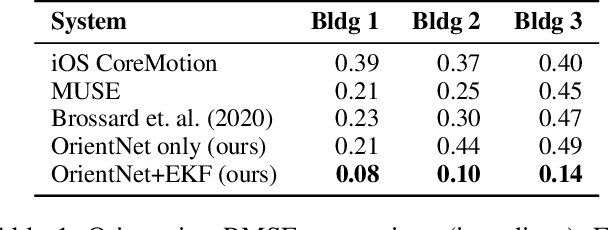
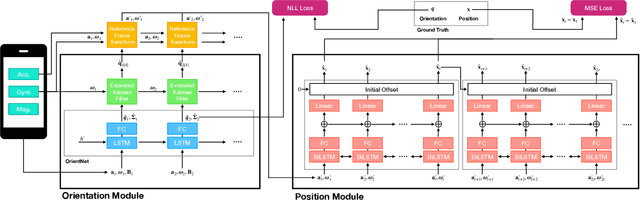

Many smartphone applications use inertial measurement units (IMUs) to sense movement, but the use of these sensors for pedestrian localization can be challenging due to their noise characteristics. Recent data-driven inertial odometry approaches have demonstrated the increasing feasibility of inertial navigation. However, they still rely upon conventional smartphone orientation estimates that they assume to be accurate, while in fact these orientation estimates can be a significant source of error. To address the problem of inaccurate orientation estimates, we present a two-stage, data-driven pipeline using a commodity smartphone that first estimates device orientations and then estimates device position. The orientation module relies on a recurrent neural network and Extended Kalman Filter to obtain orientation estimates that are used to then rotate raw IMU measurements into the appropriate reference frame. The position module then passes those measurements through another recurrent network architecture to perform localization. Our proposed method outperforms state-of-the-art methods in both orientation and position error on a large dataset we constructed that contains 20 hours of pedestrian motion across 3 buildings and 15 subjects.