 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDEQGAN: Learning the Loss Function for PINNs with Generative Adversarial Networks
Sep 15, 2022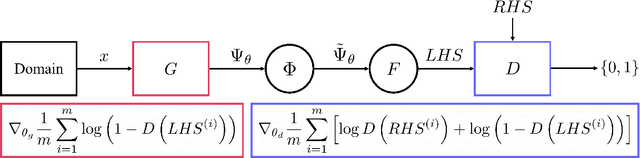
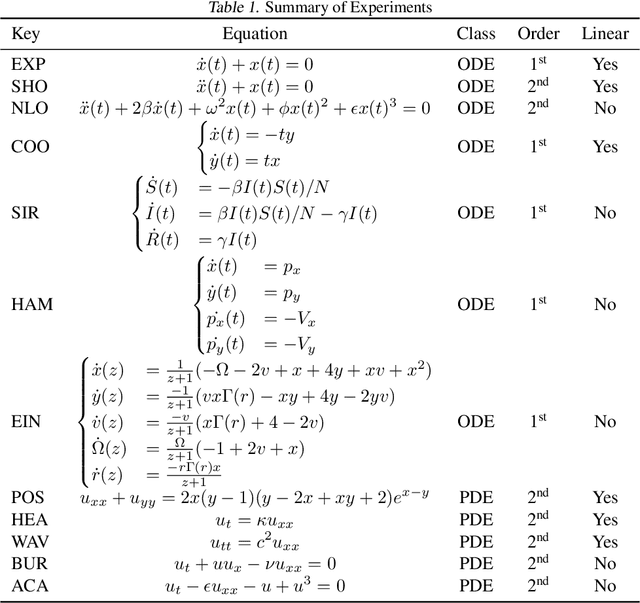
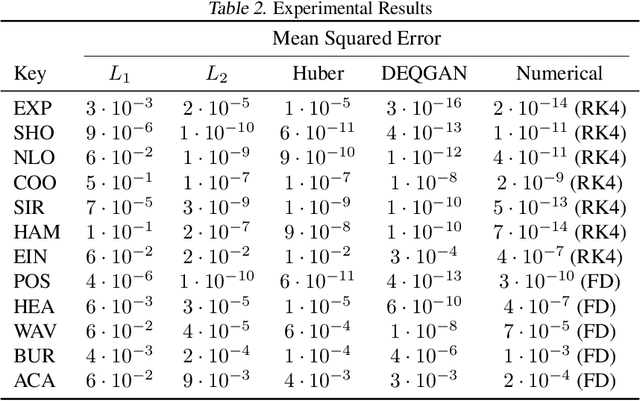
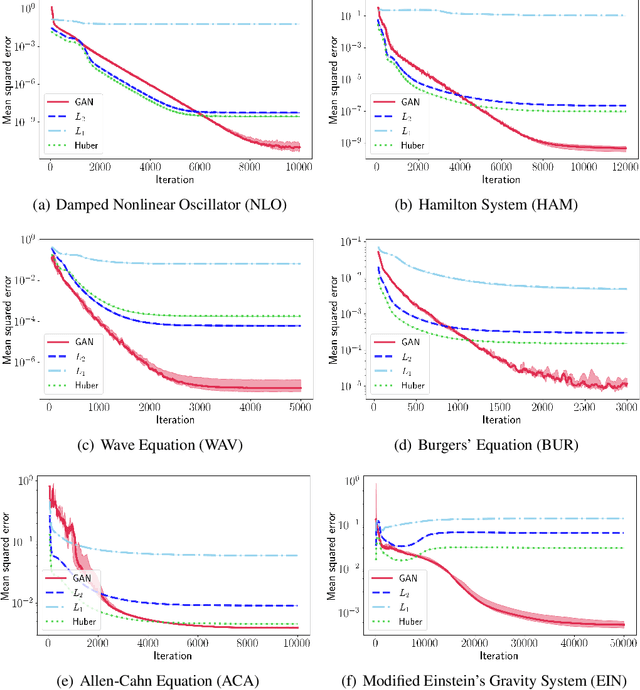
Solutions to differential equations are of significant scientific and engineering relevance. Physics-Informed Neural Networks (PINNs) have emerged as a promising method for solving differential equations, but they lack a theoretical justification for the use of any particular loss function. This work presents Differential Equation GAN (DEQGAN), a novel method for solving differential equations using generative adversarial networks to "learn the loss function" for optimizing the neural network. Presenting results on a suite of twelve ordinary and partial differential equations, including the nonlinear Burgers', Allen-Cahn, Hamilton, and modified Einstein's gravity equations, we show that DEQGAN can obtain multiple orders of magnitude lower mean squared errors than PINNs that use $L_2$, $L_1$, and Huber loss functions. We also show that DEQGAN achieves solution accuracies that are competitive with popular numerical methods. Finally, we present two methods to improve the robustness of DEQGAN to different hyperparameter settings.
Multi-Task Learning based Convolutional Models with Curriculum Learning for the Anisotropic Reynolds Stress Tensor in Turbulent Duct Flow
Oct 30, 2021



The Reynolds-averaged Navier-Stokes (RANS) equations require accurate modeling of the anisotropic Reynolds stress tensor, for which traditional closure models only give good results in certain flow configurations. Researchers have started using machine learning approaches to address this problem. In this work we build upon recent convolutional neural network architectures used for turbulence modeling and propose a multi-task learning based fully convolutional neural network that is able to accurately predict the normalized anisotropic Reynolds stress tensor for turbulent duct flow. Furthermore, we also explore the application of curriculum learning to data-driven turbulence modeling.
Port-Hamiltonian Neural Networks for Learning Explicit Time-Dependent Dynamical Systems
Jul 16, 2021Accurately learning the temporal behavior of dynamical systems requires models with well-chosen learning biases. Recent innovations embed the Hamiltonian and Lagrangian formalisms into neural networks and demonstrate a significant improvement over other approaches in predicting trajectories of physical systems. These methods generally tackle autonomous systems that depend implicitly on time or systems for which a control signal is known apriori. Despite this success, many real world dynamical systems are non-autonomous, driven by time-dependent forces and experience energy dissipation. In this study, we address the challenge of learning from such non-autonomous systems by embedding the port-Hamiltonian formalism into neural networks, a versatile framework that can capture energy dissipation and time-dependent control forces. We show that the proposed \emph{port-Hamiltonian neural network} can efficiently learn the dynamics of nonlinear physical systems of practical interest and accurately recover the underlying stationary Hamiltonian, time-dependent force, and dissipative coefficient. A promising outcome of our network is its ability to learn and predict chaotic systems such as the Duffing equation, for which the trajectories are typically hard to learn.
Unsupervised Learning of Solutions to Differential Equations with Generative Adversarial Networks
Jul 21, 2020
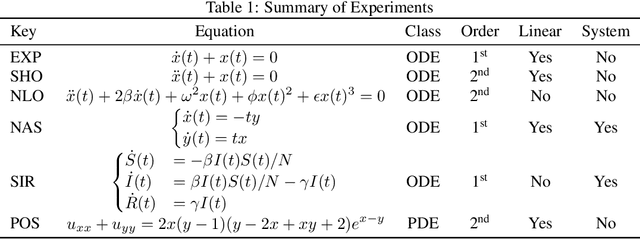
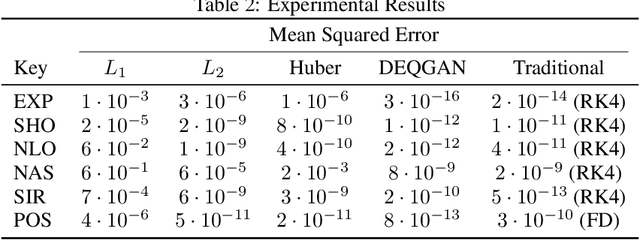
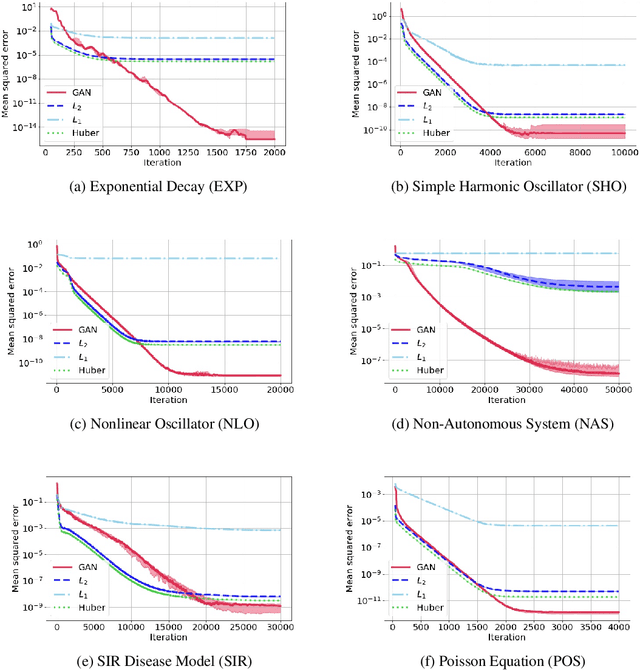
Solutions to differential equations are of significant scientific and engineering relevance. Recently, there has been a growing interest in solving differential equations with neural networks. This work develops a novel method for solving differential equations with unsupervised neural networks that applies Generative Adversarial Networks (GANs) to \emph{learn the loss function} for optimizing the neural network. We present empirical results showing that our method, which we call Differential Equation GAN (DEQGAN), can obtain multiple orders of magnitude lower mean squared errors than an alternative unsupervised neural network method based on (squared) $L_2$, $L_1$, and Huber loss functions. Moreover, we show that DEQGAN achieves solution accuracy that is competitive with traditional numerical methods. Finally, we analyze the stability of our approach and find it to be sensitive to the selection of hyperparameters, which we provide in the appendix. Code available at https://github.com/dylanrandle/denn. Please address any electronic correspondence to dylanrandle@alumni.harvard.edu.
Solving Differential Equations Using Neural Network Solution Bundles
Jun 17, 2020


The time evolution of dynamical systems is frequently described by ordinary differential equations (ODEs), which must be solved for given initial conditions. Most standard approaches numerically integrate ODEs producing a single solution whose values are computed at discrete times. When many varied solutions with different initial conditions to the ODE are required, the computational cost can become significant. We propose that a neural network be used as a solution bundle, a collection of solutions to an ODE for various initial states and system parameters. The neural network solution bundle is trained with an unsupervised loss that does not require any prior knowledge of the sought solutions, and the resulting object is differentiable in initial conditions and system parameters. The solution bundle exhibits fast, parallelizable evaluation of the system state, facilitating the use of Bayesian inference for parameter estimation in real dynamical systems.
Hamiltonian Neural Networks for solving differential equations
Feb 12, 2020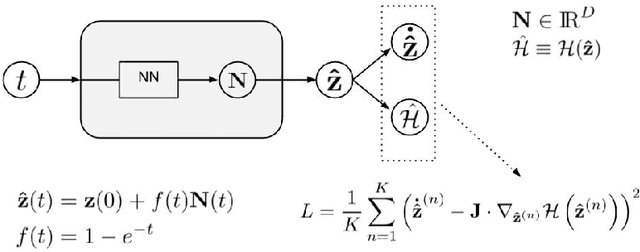
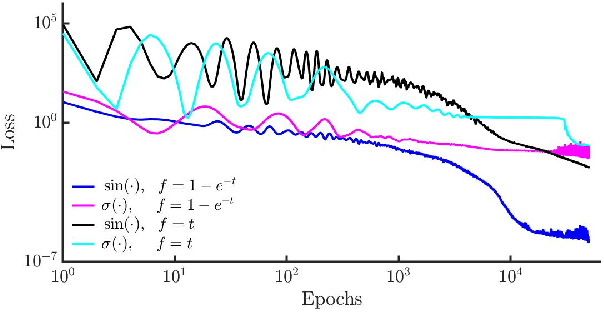
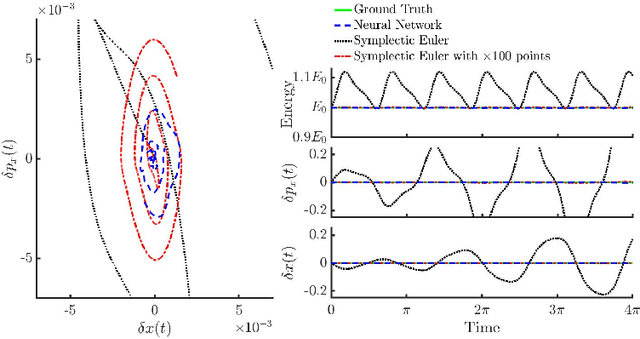
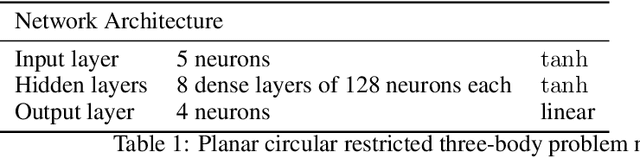
There has been a wave of interest in applying machine learning to study dynamical systems. In particular, neural networks have been applied to solve the equations of motion, and therefore, track the evolution of a system. In contrast to other applications of neural networks and machine learning, dynamical systems -- depending on their underlying symmetries -- possess invariants such as energy, momentum, and angular momentum. Traditional numerical iteration methods usually violate these conservation laws, propagating errors in time, and reducing the predictability of the method. We present a Hamiltonian neural network that solves the differential equations that govern dynamical systems. This unsupervised model is learning solutions that satisfy identically, up to an arbitrarily small error, Hamilton's equations and, therefore, conserve the Hamiltonian invariants. Once it is optimized, the proposed architecture is considered a symplectic unit due to the introduction of an efficient parametric form of solutions. In addition, by sharing the network parameters and the choice of an appropriate activation function drastically improve the predictability of the network. An error analysis is derived and states that the numerical errors depend on the overall network performance. The symplectic architecture is then employed to solve the equations for the nonlinear oscillator and the chaotic Henon-Heiles dynamical system. In both systems, the symplectic Euler integrator requires two orders more evaluation points than the Hamiltonian network in order to achieve the same order of the numerical error in the predicted phase space trajectories.