 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgexList-Hate: A Checklist-Based Framework for Interpretable and Generalizable Hate Speech Detection
Feb 05, 2026Hate speech detection is commonly framed as a direct binary classification problem despite being a composite concept defined through multiple interacting factors that vary across legal frameworks, platform policies, and annotation guidelines. As a result, supervised models often overfit dataset-specific definitions and exhibit limited robustness under domain shift and annotation noise. We introduce xList-Hate, a diagnostic framework that decomposes hate speech detection into a checklist of explicit, concept-level questions grounded in widely shared normative criteria. Each question is independently answered by a large language model (LLM), producing a binary diagnostic representation that captures hateful content features without directly predicting the final label. These diagnostic signals are then aggregated by a lightweight, fully interpretable decision tree, yielding transparent and auditable predictions. We evaluate it across multiple hate speech benchmarks and model families, comparing it against zero-shot LLM classification and in-domain supervised fine-tuning. While supervised methods typically maximize in-domain performance, we consistently improves cross-dataset robustness and relative performance under domain shift. In addition, qualitative analysis of disagreement cases provides evidence that the framework can be less sensitive to certain forms of annotation inconsistency and contextual ambiguity. Crucially, the approach enables fine-grained interpretability through explicit decision paths and factor-level analysis. Our results suggest that reframing hate speech detection as a diagnostic reasoning task, rather than a monolithic classification problem, provides a robust, explainable, and extensible alternative for content moderation.
CLIP4VI-ReID: Learning Modality-shared Representations via CLIP Semantic Bridge for Visible-Infrared Person Re-identification
Nov 13, 2025This paper proposes a novel CLIP-driven modality-shared representation learning network named CLIP4VI-ReID for VI-ReID task, which consists of Text Semantic Generation (TSG), Infrared Feature Embedding (IFE), and High-level Semantic Alignment (HSA). Specifically, considering the huge gap in the physical characteristics between natural images and infrared images, the TSG is designed to generate text semantics only for visible images, thereby enabling preliminary visible-text modality alignment. Then, the IFE is proposed to rectify the feature embeddings of infrared images using the generated text semantics. This process injects id-related semantics into the shared image encoder, enhancing its adaptability to the infrared modality. Besides, with text serving as a bridge, it enables indirect visible-infrared modality alignment. Finally, the HSA is established to refine the high-level semantic alignment. This process ensures that the fine-tuned text semantics only contain id-related information, thereby achieving more accurate cross-modal alignment and enhancing the discriminability of the learned modal-shared representations. Extensive experimental results demonstrate that the proposed CLIP4VI-ReID achieves superior performance than other state-of-the-art methods on some widely used VI-ReID datasets.
Decoding Latent Spaces: Assessing the Interpretability of Time Series Foundation Models for Visual Analytics
Apr 26, 2025The present study explores the interpretability of latent spaces produced by time series foundation models, focusing on their potential for visual analysis tasks. Specifically, we evaluate the MOMENT family of models, a set of transformer-based, pre-trained architectures for multivariate time series tasks such as: imputation, prediction, classification, and anomaly detection. We evaluate the capacity of these models on five datasets to capture the underlying structures in time series data within their latent space projection and validate whether fine tuning improves the clarity of the resulting embedding spaces. Notable performance improvements in terms of loss reduction were observed after fine tuning. Visual analysis shows limited improvement in the interpretability of the embeddings, requiring further work. Results suggest that, although Time Series Foundation Models such as MOMENT are robust, their latent spaces may require additional methodological refinements to be adequately interpreted, such as alternative projection techniques, loss functions, or data preprocessing strategies. Despite the limitations of MOMENT, foundation models supose a big reduction in execution time and so a great advance for interactive visual analytics.
Pushing the boundary on Natural Language Inference
Apr 25, 2025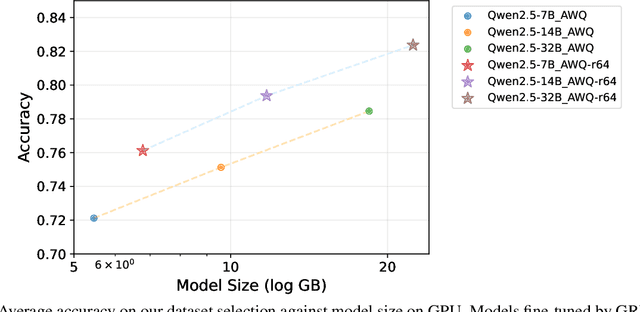
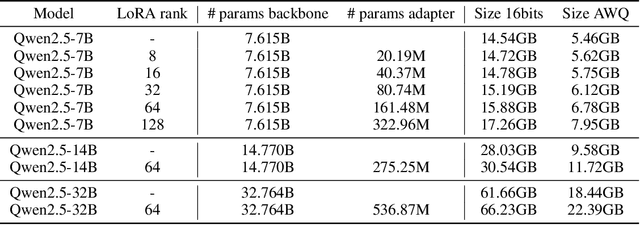
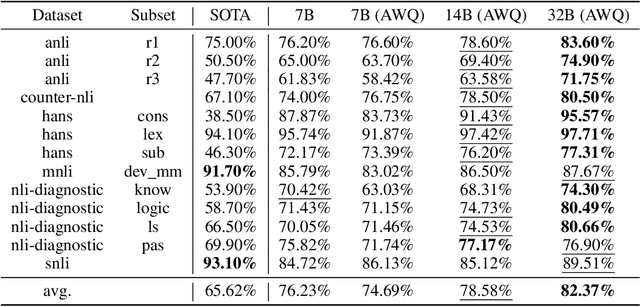
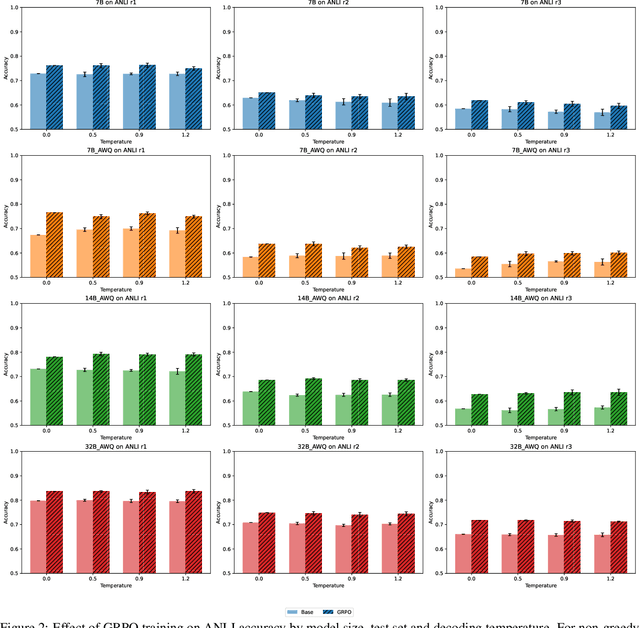
Natural Language Inference (NLI) is a central task in natural language understanding with applications in fact-checking, question answering, and information retrieval. Despite its importance, current NLI systems heavily rely on supervised learning with datasets that often contain annotation artifacts and biases, limiting generalization and real-world applicability. In this work, we apply a reinforcement learning-based approach using Group Relative Policy Optimization (GRPO) for Chain-of-Thought (CoT) learning in NLI, eliminating the need for labeled rationales and enabling this type of training on more challenging datasets such as ANLI. We fine-tune 7B, 14B, and 32B language models using parameter-efficient techniques (LoRA and QLoRA), demonstrating strong performance across standard and adversarial NLI benchmarks. Our 32B AWQ-quantized model surpasses state-of-the-art results on 7 out of 11 adversarial sets$\unicode{x2013}$or on all of them considering our replication$\unicode{x2013}$within a 22GB memory footprint, showing that robust reasoning can be retained under aggressive quantization. This work provides a scalable and practical framework for building robust NLI systems without sacrificing inference quality.
Statistical Analysis of Risk Assessment Factors and Metrics to Evaluate Radicalisation in Twitter
Jan 28, 2025Nowadays, Social Networks have become an essential communication tools producing a large amount of information about their users and their interactions, which can be analysed with Data Mining methods. In the last years, Social Networks are being used to radicalise people. In this paper, we study the performance of a set of indicators and their respective metrics, devoted to assess the risk of radicalisation of a precise individual on three different datasets. Keyword-based metrics, even though depending on the written language, performs well when measuring frustration, perception of discrimination as well as declaration of negative and positive ideas about Western society and Jihadism, respectively. However, metrics based on frequent habits such as writing ellipses are not well enough to characterise a user in risk of radicalisation. The paper presents a detailed description of both, the set of indicators used to asses the radicalisation in Social Networks and the set of datasets used to evaluate them. Finally, an experimental study over these datasets are carried out to evaluate the performance of the metrics considered.
On the locality bias and results in the Long Range Arena
Jan 24, 2025The Long Range Arena (LRA) benchmark was designed to evaluate the performance of Transformer improvements and alternatives in long-range dependency modeling tasks. The Transformer and its main variants performed poorly on this benchmark, and a new series of architectures such as State Space Models (SSMs) gained some traction, greatly outperforming Transformers in the LRA. Recent work has shown that with a denoising pre-training phase, Transformers can achieve competitive results in the LRA with these new architectures. In this work, we discuss and explain the superiority of architectures such as MEGA and SSMs in the Long Range Arena, as well as the recent improvement in the results of Transformers, pointing to the positional and local nature of the tasks. We show that while the LRA is a benchmark for long-range dependency modeling, in reality most of the performance comes from short-range dependencies. Using training techniques to mitigate data inefficiency, Transformers are able to reach state-of-the-art performance with proper positional encoding. In addition, with the same techniques, we were able to remove all restrictions from SSM convolutional kernels and learn fully parameterized convolutions without decreasing performance, suggesting that the design choices behind SSMs simply added inductive biases and learning efficiency for these particular tasks. Our insights indicate that LRA results should be interpreted with caution and call for a redesign of the benchmark.
Not all tokens are created equal: Perplexity Attention Weighted Networks for AI generated text detection
Jan 07, 2025



The rapid advancement in large language models (LLMs) has significantly enhanced their ability to generate coherent and contextually relevant text, raising concerns about the misuse of AI-generated content and making it critical to detect it. However, the task remains challenging, particularly in unseen domains or with unfamiliar LLMs. Leveraging LLM next-token distribution outputs offers a theoretically appealing approach for detection, as they encapsulate insights from the models' extensive pre-training on diverse corpora. Despite its promise, zero-shot methods that attempt to operationalize these outputs have met with limited success. We hypothesize that one of the problems is that they use the mean to aggregate next-token distribution metrics across tokens, when some tokens are naturally easier or harder to predict and should be weighted differently. Based on this idea, we propose the Perplexity Attention Weighted Network (PAWN), which uses the last hidden states of the LLM and positions to weight the sum of a series of features based on metrics from the next-token distribution across the sequence length. Although not zero-shot, our method allows us to cache the last hidden states and next-token distribution metrics on disk, greatly reducing the training resource requirements. PAWN shows competitive and even better performance in-distribution than the strongest baselines (fine-tuned LMs) with a fraction of their trainable parameters. Our model also generalizes better to unseen domains and source models, with smaller variability in the decision boundary across distribution shifts. It is also more robust to adversarial attacks, and if the backbone has multilingual capabilities, it presents decent generalization to languages not seen during supervised training, with LLaMA3-1B reaching a mean macro-averaged F1 score of 81.46% in cross-validation with nine languages.
Isolating authorship from content with semantic embeddings and contrastive learning
Nov 27, 2024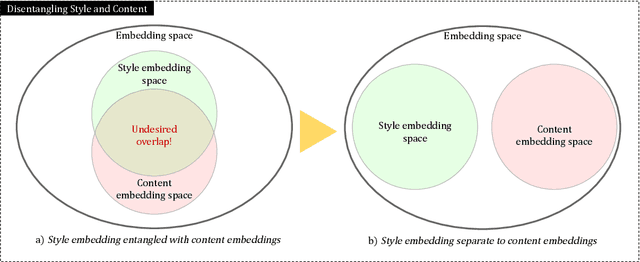
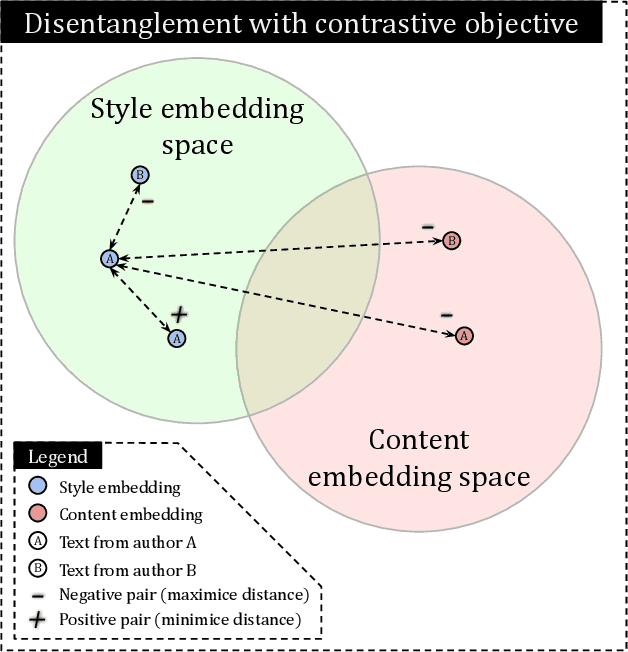
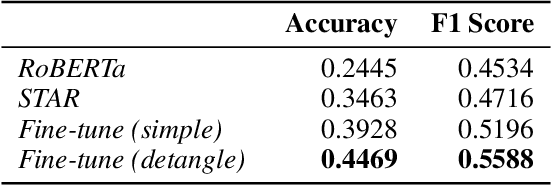
Authorship has entangled style and content inside. Authors frequently write about the same topics in the same style, so when different authors write about the exact same topic the easiest way out to distinguish them is by understanding the nuances of their style. Modern neural models for authorship can pick up these features using contrastive learning, however, some amount of content leakage is always present. Our aim is to reduce the inevitable impact and correlation between content and authorship. We present a technique to use contrastive learning (InfoNCE) with additional hard negatives synthetically created using a semantic similarity model. This disentanglement technique aims to distance the content embedding space from the style embedding space, leading to embeddings more informed by style. We demonstrate the performance with ablations on two different datasets and compare them on out-of-domain challenges. Improvements are clearly shown on challenging evaluations on prolific authors with up to a 10% increase in accuracy when the settings are particularly hard. Trials on challenges also demonstrate the preservation of zero-shot capabilities of this method as fine tuning.
Exploring Scalability in Large-Scale Time Series in DeepVATS framework
Aug 08, 2024Visual analytics is essential for studying large time series due to its ability to reveal trends, anomalies, and insights. DeepVATS is a tool that merges Deep Learning (Deep) with Visual Analytics (VA) for the analysis of large time series data (TS). It has three interconnected modules. The Deep Learning module, developed in R, manages the load of datasets and Deep Learning models from and to the Storage module. This module also supports models training and the acquisition of the embeddings from the latent space of the trained model. The Storage module operates using the Weights and Biases system. Subsequently, these embeddings can be analyzed in the Visual Analytics module. This module, based on an R Shiny application, allows the adjustment of the parameters related to the projection and clustering of the embeddings space. Once these parameters are set, interactive plots representing both the embeddings, and the time series are shown. This paper introduces the tool and examines its scalability through log analytics. The execution time evolution is examined while the length of the time series is varied. This is achieved by resampling a large data series into smaller subsets and logging the main execution and rendering times for later analysis of scalability.
Generative Design of Periodic Orbits in the Restricted Three-Body Problem
Aug 07, 2024The Three-Body Problem has fascinated scientists for centuries and it has been crucial in the design of modern space missions. Recent developments in Generative Artificial Intelligence hold transformative promise for addressing this longstanding problem. This work investigates the use of Variational Autoencoder (VAE) and its internal representation to generate periodic orbits. We utilize a comprehensive dataset of periodic orbits in the Circular Restricted Three-Body Problem (CR3BP) to train deep-learning architectures that capture key orbital characteristics, and we set up physical evaluation metrics for the generated trajectories. Through this investigation, we seek to enhance the understanding of how Generative AI can improve space mission planning and astrodynamics research, leading to novel, data-driven approaches in the field.