 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA revision on Multi-Criteria Decision Making methods for Multi-UAV Mission Planning Support
Feb 28, 2024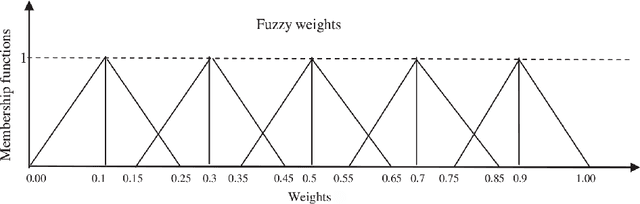
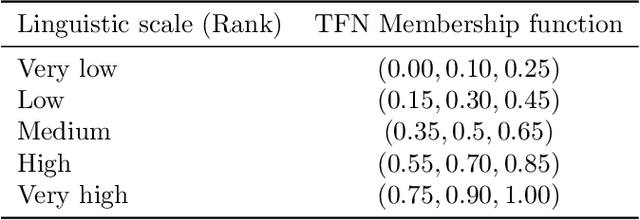
Over the last decade, Unmanned Aerial Vehicles (UAVs) have been extensively used in many commercial applications due to their manageability and risk avoidance. One of the main problems considered is the Mission Planning for multiple UAVs, where a solution plan must be found satisfying the different constraints of the problem. This problem has multiple variables that must be optimized simultaneously, such as the makespan, the cost of the mission or the risk. Therefore, the problem has a lot of possible optimal solutions, and the operator must select the final solution to be executed among them. In order to reduce the workload of the operator in this decision process, a Decision Support System (DSS) becomes necessary. In this work, a DSS consisting of ranking and filtering systems, which order and reduce the optimal solutions, has been designed. With regard to the ranking system, a wide range of Multi-Criteria Decision Making (MCDM) methods, including some fuzzy MCDM, are compared on a multi-UAV mission planning scenario, in order to study which method could fit better in a multi-UAV decision support system. Expert operators have evaluated the solutions returned, and the results show, on the one hand, that fuzzy methods generally achieve better average scores, and on the other, that all of the tested methods perform better when the preferences of the operators are biased towards a specific variable, and worse when their preferences are balanced. For the filtering system, a similarity function based on the proximity of the solutions has been designed, and on top of that, a threshold is tuned empirically to decide how to filter solutions without losing much of the hypervolume of the space of solutions.
* Preprint submitted and acepted in Expert Systems with Applications
Extending QGroundControl for Automated Mission Planning of UAVs
Feb 28, 2024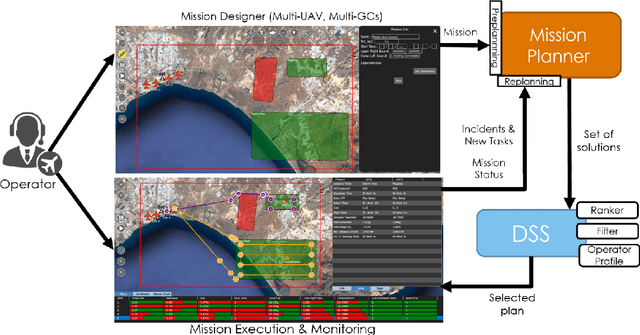
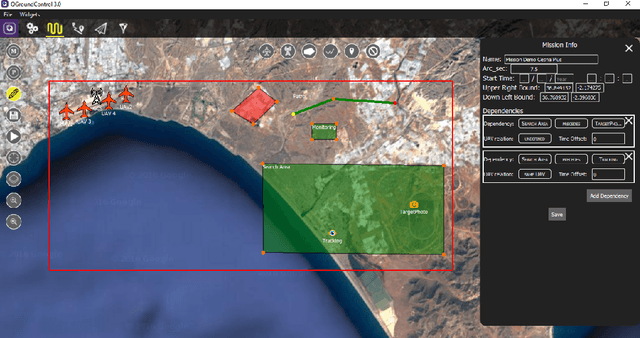
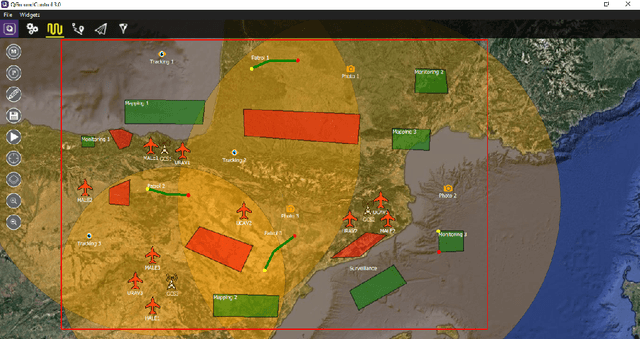
Unmanned Aerial Vehicle (UAVs) have become very popular in the last decade due to some advantages such as strong terrain adaptation, low cost, zero casualties, and so on. One of the most interesting advances in this field is the automation of mission planning (task allocation) and real-time replanning, which are highly useful to increase the autonomy of the vehicle and reduce the operator workload. These automated mission planning and replanning systems require a Human Computer Interface (HCI) that facilitates the visualization and selection of plans that will be executed by the vehicles. In addition, most missions should be assessed before their real-life execution. This paper extends QGroundControl, an open-source simulation environment for flight control of multiple vehicles, by adding a mission designer that permits the operator to build complex missions with tasks and other scenario items; an interface for automated mission planning and replanning, which works as a test bed for different algorithms, and a Decision Support System (DSS) that helps the operator in the selection of the plan. In this work, a complete guide of these systems and some practical use cases are provided.
* Preprint submitted and accepted in Sensors
Weighted strategies to guide a multi-objective evolutionary algorithm for multi-UAV mission planning
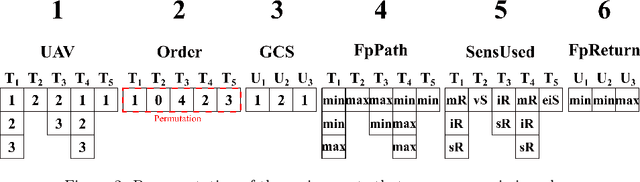
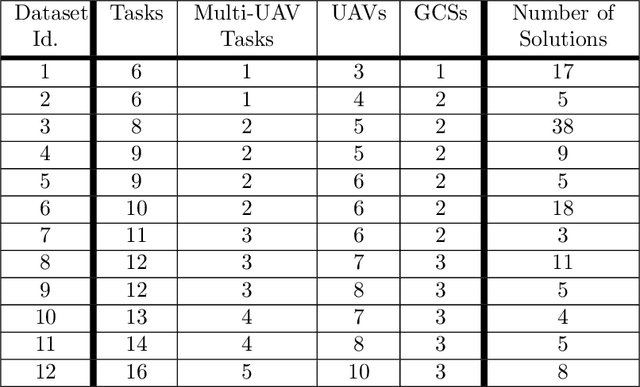
Feb 28, 2024Management and mission planning over a swarm of unmanned aerial vehicle (UAV) remains to date as a challenging research trend in what regards to this particular type of aircrafts. These vehicles are controlled by a number of ground control station (GCS), from which they are commanded to cooperatively perform different tasks in specific geographic areas of interest. Mathematically the problem of coordinating and assigning tasks to a swarm of UAV can be modeled as a constraint satisfaction problem, whose complexity and multiple conflicting criteria has hitherto motivated the adoption of multi-objective solvers such as multi-objective evolutionary algorithm (MOEA). The encoding approach consists of different alleles representing the decision variables, whereas the fitness function checks that all constraints are fulfilled, minimizing the optimization criteria of the problem. In problems of high complexity involving several tasks, UAV and GCS, where the space of search is huge compared to the space of valid solutions, the convergence rate of the algorithm increases significantly. To overcome this issue, this work proposes a weighted random generator for the creation and mutation of new individuals. The main objective of this work is to reduce the convergence rate of the MOEA solver for multi-UAV mission planning using weighted random strategies that focus the search on potentially better regions of the solution space. Extensive experimental results over a diverse range of scenarios evince the benefits of the proposed approach, which notably improves this convergence rate with respect to a na\"ive MOEA approach.
* Preprint submitted and accepted in Swarm and Evolutionary Computation
Constrained multi-objective optimization for multi-UAV planning
Feb 09, 2024Over the last decade, developments in unmanned aerial vehicles (UAVs) has greatly increased, and they are being used in many fields including surveillance, crisis management or automated mission planning. This last field implies the search of plans for missions with multiple tasks, UAVs and ground control stations; and the optimization of several objectives, including makespan, fuel consumption or cost, among others. In this work, this problem has been solved using a multi-objective evolutionary algorithm combined with a constraint satisfaction problem model, which is used in the fitness function of the algorithm. The algorithm has been tested on several missions of increasing complexity, and the computational complexity of the different element considered in the missions has been studied.
* Preprint of the article submitted and published in Journal of Ambient Intelligence and Humanized Computing
Solving Complex Multi-UAV Mission Planning Problems using Multi-objective Genetic Algorithms
Feb 09, 2024Due to recent booming of UAVs technologies, these are being used in many fields involving complex tasks. Some of them involve a high risk to the vehicle driver, such as fire monitoring and rescue tasks, which make UAVs excellent for avoiding human risks. Mission Planning for UAVs is the process of planning the locations and actions (loading/dropping a load, taking videos/pictures, acquiring information) for the vehicles, typically over a time period. These vehicles are controlled from Ground Control Stations (GCSs) where human operators use rudimentary systems. This paper presents a new Multi-Objective Genetic Algorithm for solving complex Mission Planning Problems (MPP) involving a team of UAVs and a set of GCSs. A hybrid fitness function has been designed using a Constraint Satisfaction Problem (CSP) to check if solutions are valid and Pareto-based measures to look for optimal solutions. The algorithm has been tested on several datasets optimizing different variables of the mission, such as the makespan, the fuel consumption, distance, etc. Experimental results show that the new algorithm is able to obtain good solutions, however as the problem becomes more complex, the optimal solutions also become harder to find.
* This is a preprint version of the article submitted and published in Soft Computing
sKPNSGA-II: Knee point based MOEA with self-adaptive angle for Mission Planning Problems
Feb 20, 2020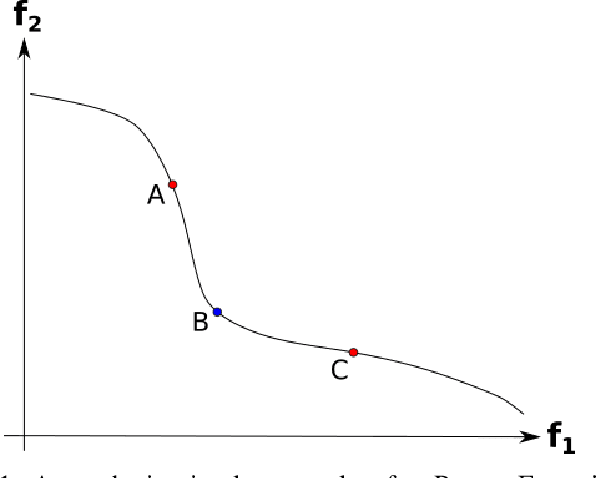
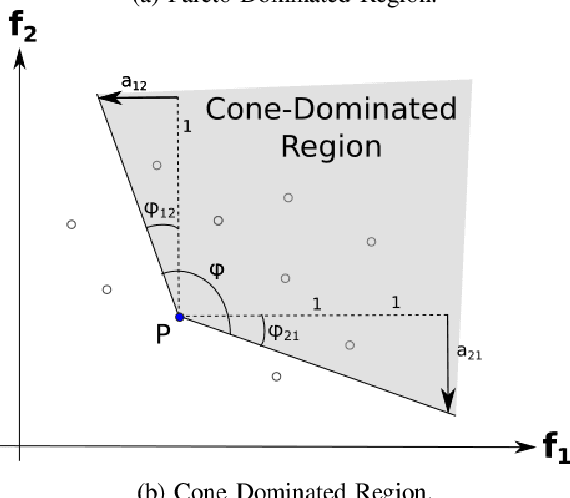
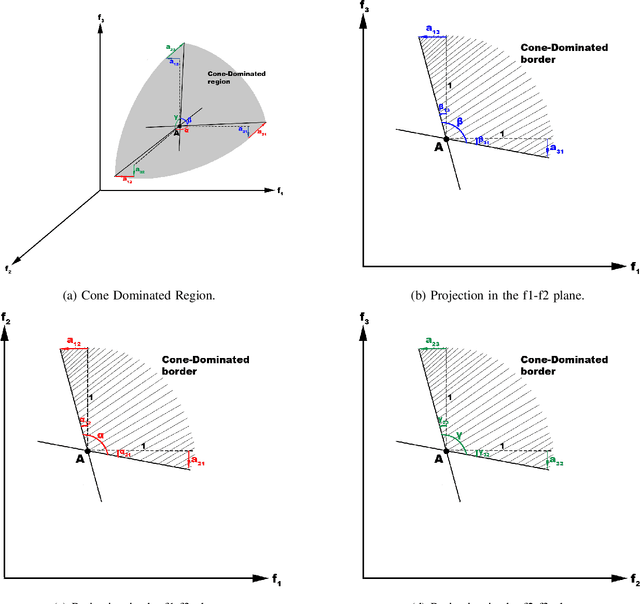
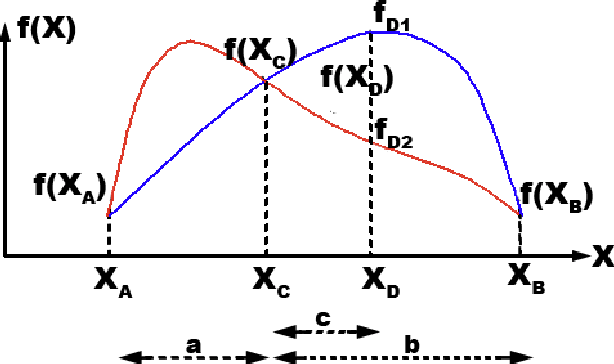
Real-world and complex problems have usually many objective functions that have to be optimized all at once. Over the last decades, Multi-Objective Evolutionary Algorithms (MOEAs) are designed to solve this kind of problems. Nevertheless, some problems have many objectives which lead to a large number of non-dominated solutions obtained by the optimization algorithms. The large set of non-dominated solutions hinders the selection of the most appropriate solution by the decision maker. This paper presents a new algorithm that has been designed to obtain the most significant solutions from the Pareto Optimal Frontier (POF). This approach is based on the cone-domination applied to MOEA, which can find the knee point solutions. In order to obtain the best cone angle, we propose a hypervolume-distribution metric, which is used to self-adapt the angle during the evolving process. This new algorithm has been applied to the real world application in Unmanned Air Vehicle (UAV) Mission Planning Problem. The experimental results show a significant improvement of the algorithm performance in terms of hypervolume, number of solutions, and also the required number of generations to converge.