 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHessian-augmented Supervised Learning for Hamilton-Jacobi-Bellman PDEs
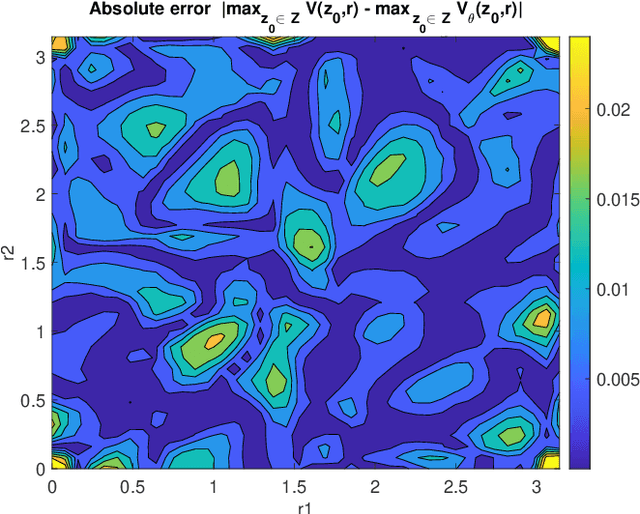
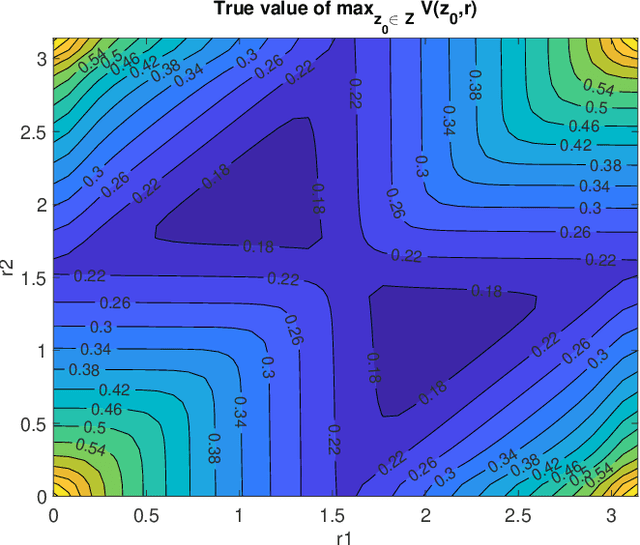
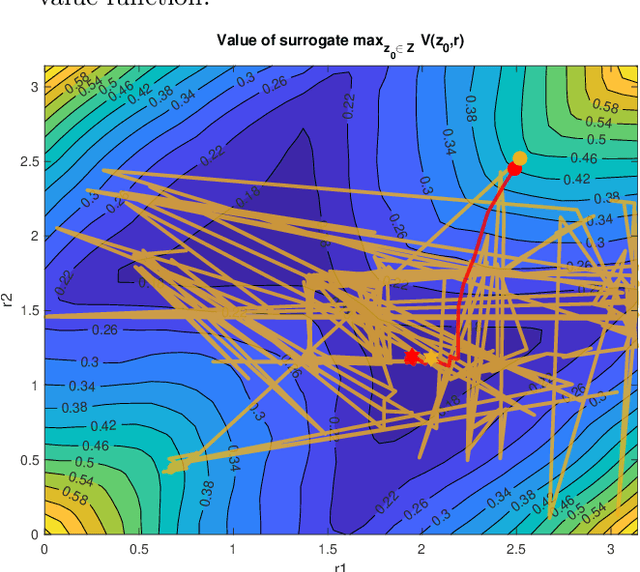
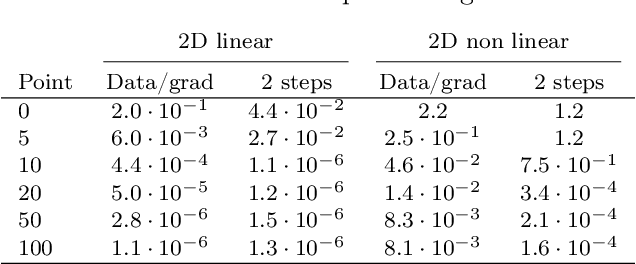
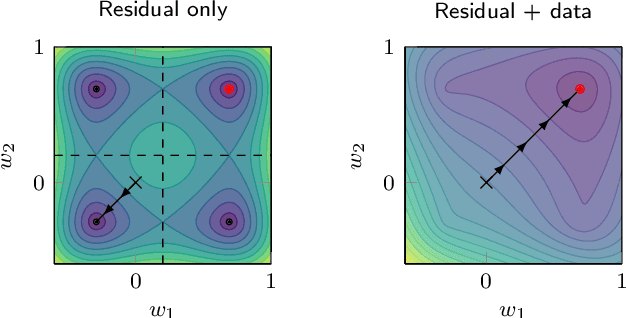
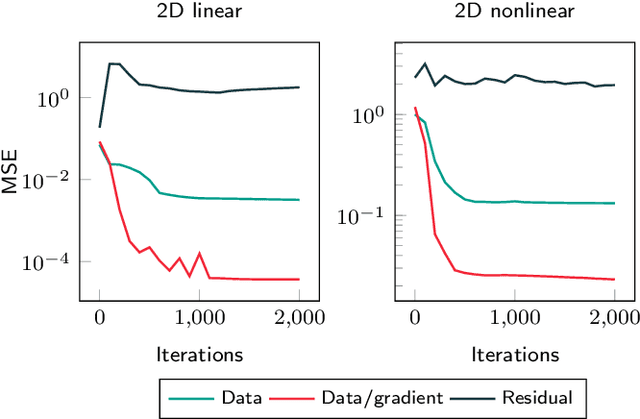
Jun 22, 2026A data-driven method is developed for approximating value functions in deterministic optimal control problems with nonlinear control-affine dynamics. The Pontryagin Maximum Principle optimality system is solved from multiple initial conditions to generate training data consisting of values, gradients, and Hessians of the value function, where Hessian information is obtained from a matrix Riccati equation along optimal trajectories. These quantities augment a weighted least-squares regression over sparse polynomial bases on hyperbolic cross index sets, with gradients and Hessians contributing additional linear equations per sample and substantially reducing sample complexity compared to value-only regression. Feedback laws are recovered analytically from the learned value function. In high dimensions, a partial Hessian strategy controls the cost of data generation. The approach is validated on problems of increasing state dimension, where second-order data augmentation is shown to improve approximation accuracy and closed-loop performance, with up to an order-of-magnitude reduction in the number of training samples required relative to lower-order methods.
Nonlocal Mean Field Schrödinger Bridge with Learned Interactions
Jun 02, 2026The Schrödinger Bridge Problem constructs a stochastic process that connects an initial distribution to a terminal distribution with minimum energy. This work considers its mean-field extension, the Mean-Field Schrödinger Bridge, for interacting particle systems. With nonlocal interactions, evaluating the resulting particle-dependent distributional terms can scale quadratically with the population size, which makes large-scale problems intractable. We address this bottleneck by approximating the nonlocal interactions with neural network surrogates. The resulting four-stage alternating algorithm reduces the per-step cost from quadratic to linear in the population size at inference. We also derive Grönwall-type stability bounds that show how surrogate errors propagate to the generated trajectories. In numerical experiments on navigation and opinion-dynamics tasks, the proposed method reproduces trajectories obtained with analytical evaluation and reduces training time.
Data/moment-driven approaches for fast predictive control of collective dynamics
Feb 23, 2024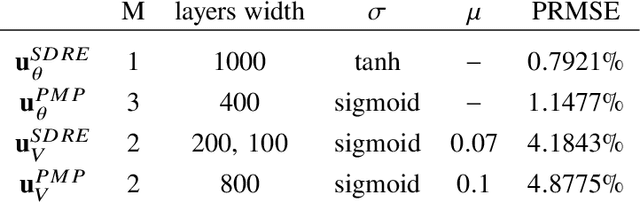
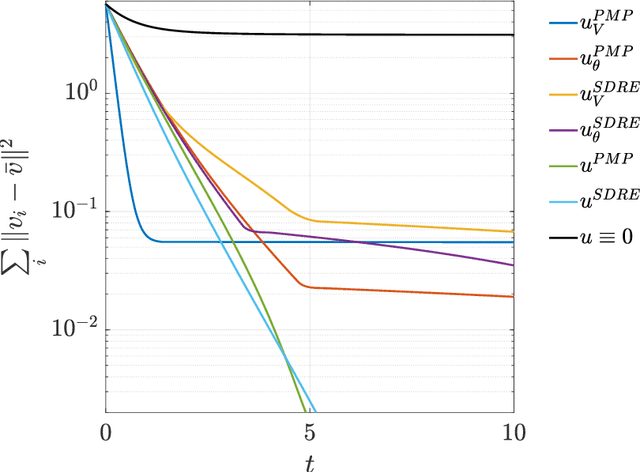

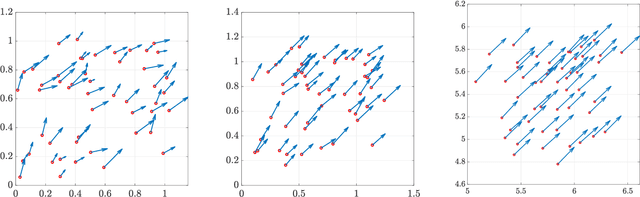
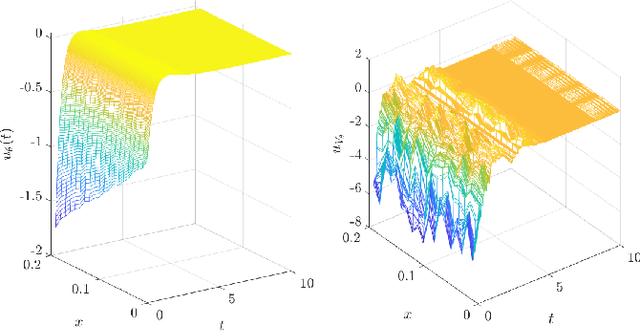
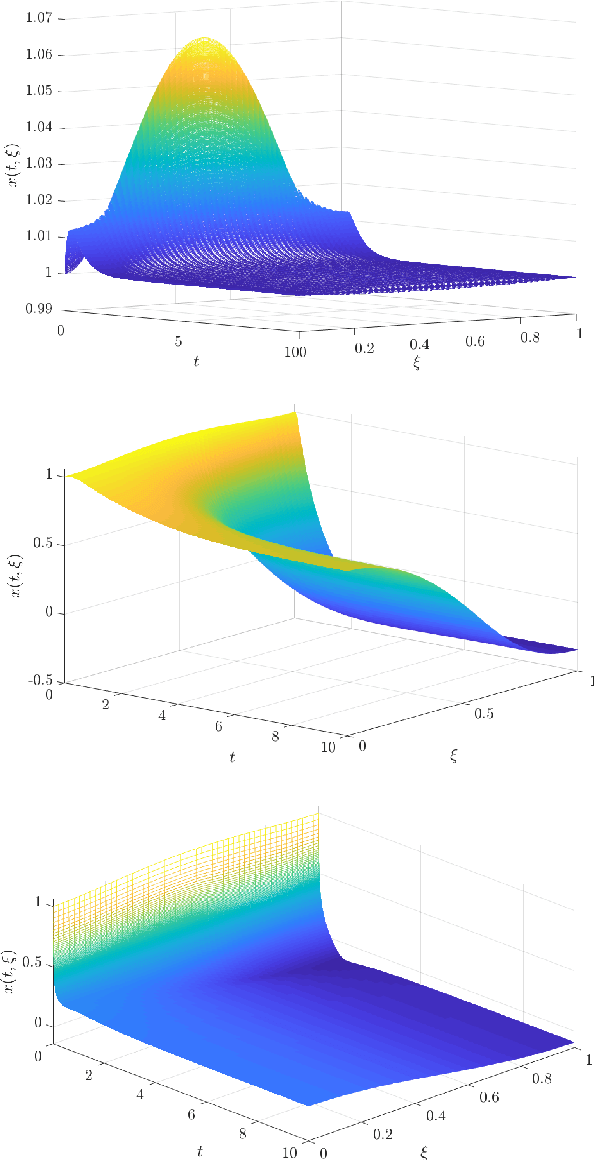
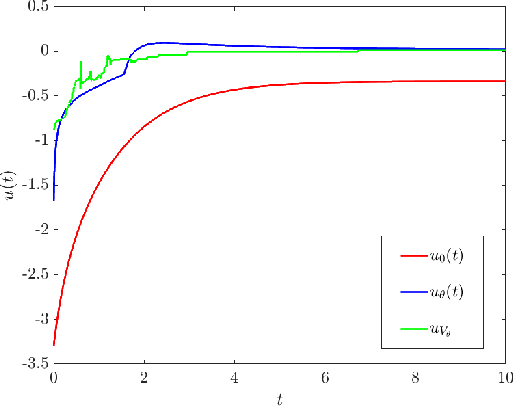
Feedback control synthesis for large-scale particle systems is reviewed in the framework of model predictive control (MPC). The high-dimensional character of collective dynamics hampers the performance of traditional MPC algorithms based on fast online dynamic optimization at every time step. Two alternatives to MPC are proposed. First, the use of supervised learning techniques for the offline approximation of optimal feedback laws is discussed. Then, a procedure based on sequential linearization of the dynamics based on macroscopic quantities of the particle ensemble is reviewed. Both approaches circumvent the online solution of optimal control problems enabling fast, real-time, feedback synthesis for large-scale particle systems. Numerical experiments assess the performance of the proposed algorithms.
Multi-level Optimal Control with Neural Surrogate Models
Feb 12, 2024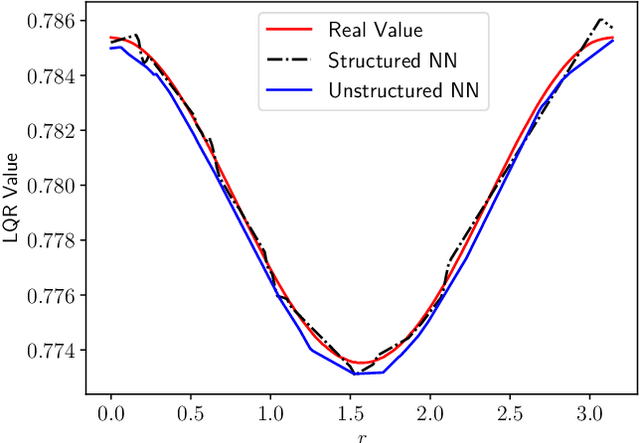
Optimal actuator and control design is studied as a multi-level optimisation problem, where the actuator design is evaluated based on the performance of the associated optimal closed loop. The evaluation of the optimal closed loop for a given actuator realisation is a computationally demanding task, for which the use of a neural network surrogate is proposed. The use of neural network surrogates to replace the lower level of the optimisation hierarchy enables the use of fast gradient-based and gradient-free consensus-based optimisation methods to determine the optimal actuator design. The effectiveness of the proposed surrogate models and optimisation methods is assessed in a test related to optimal actuator location for heat control.
Data-driven initialization of deep learning solvers for Hamilton-Jacobi-Bellman PDEs
Jul 19, 2022
A deep learning approach for the approximation of the Hamilton-Jacobi-Bellman partial differential equation (HJB PDE) associated to the Nonlinear Quadratic Regulator (NLQR) problem. A state-dependent Riccati equation control law is first used to generate a gradient-augmented synthetic dataset for supervised learning. The resulting model becomes a warm start for the minimization of a loss function based on the residual of the HJB PDE. The combination of supervised learning and residual minimization avoids spurious solutions and mitigate the data inefficiency of a supervised learning-only approach. Numerical tests validate the different advantages of the proposed methodology.
Gradient-augmented Supervised Learning of Optimal Feedback Laws Using State-dependent Riccati Equations
Mar 06, 2021
A supervised learning approach for the solution of large-scale nonlinear stabilization problems is presented. A stabilizing feedback law is trained from a dataset generated from State-dependent Riccati Equation solves. The training phase is enriched by the use gradient information in the loss function, which is weighted through the use of hyperparameters. High-dimensional nonlinear stabilization tests demonstrate that real-time sequential large-scale Algebraic Riccati Equation solves can be substituted by a suitably trained feedforward neural network.