 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge Data Limits of Laplace Learning for Gaussian Measure Data in Infinite Dimensions
Jan 20, 2026Laplace learning is a semi-supervised method, a solution for finding missing labels from a partially labeled dataset utilizing the geometry given by the unlabeled data points. The method minimizes a Dirichlet energy defined on a (discrete) graph constructed from the full dataset. In finite dimensions the asymptotics in the large (unlabeled) data limit are well understood with convergence from the graph setting to a continuum Sobolev semi-norm weighted by the Lebesgue density of the data-generating measure. The lack of the Lebesgue measure on infinite-dimensional spaces requires rethinking the analysis if the data aren't finite-dimensional. In this paper we make a first step in this direction by analyzing the setting when the data are generated by a Gaussian measure on a Hilbert space and proving pointwise convergence of the graph Dirichlet energy.
Kernel-Based Learning of Safety Barriers
Jan 17, 2026The rapid integration of AI algorithms in safety-critical applications such as autonomous driving and healthcare is raising significant concerns about the ability to meet stringent safety standards. Traditional tools for formal safety verification struggle with the black-box nature of AI-driven systems and lack the flexibility needed to scale to the complexity of real-world applications. In this paper, we present a data-driven approach for safety verification and synthesis of black-box systems with discrete-time stochastic dynamics. We employ the concept of control barrier certificates, which can guarantee safety of the system, and learn the certificate directly from a set of system trajectories. We use conditional mean embeddings to embed data from the system into a reproducing kernel Hilbert space (RKHS) and construct an RKHS ambiguity set that can be inflated to robustify the result to out-of-distribution behavior. We provide the theoretical results on how to apply the approach to general classes of temporal logic specifications beyond safety. For the data-driven computation of safety barriers, we leverage a finite Fourier expansion to cast a typically intractable semi-infinite optimization problem as a linear program. The resulting spectral barrier allows us to leverage the fast Fourier transform to generate the relaxed problem efficiently, offering a scalable yet distributionally robust framework for verifying safety. Our work moves beyond restrictive assumptions on system dynamics and uncertainty, as demonstrated on two case studies including a black-box system with a neural network controller.
Data-Driven Distributionally Robust Safety Verification Using Barrier Certificates and Conditional Mean Embeddings
Mar 15, 2024

Algorithmic verification of realistic systems to satisfy safety and other temporal requirements has suffered from poor scalability of the employed formal approaches. To design systems with rigorous guarantees, many approaches still rely on exact models of the underlying systems. Since this assumption can rarely be met in practice, models have to be inferred from measurement data or are bypassed completely. Whilst former usually requires the model structure to be known a-priori and immense amounts of data to be available, latter gives rise to a plethora of restrictive mathematical assumptions about the unknown dynamics. In a pursuit of developing scalable formal verification algorithms without shifting the problem to unrealistic assumptions, we employ the concept of barrier certificates, which can guarantee safety of the system, and learn the certificate directly from a compact set of system trajectories. We use conditional mean embeddings to embed data from the system into a reproducing kernel Hilbert space (RKHS) and construct an RKHS ambiguity set that can be inflated to robustify the result w.r.t. a set of plausible transition kernels. We show how to solve the resulting program efficiently using sum-of-squares optimization and a Gaussian process envelope. Our approach lifts the need for restrictive assumptions on the system dynamics and uncertainty, and suggests an improvement in the sample complexity of verifying the safety of a system on a tested case study compared to a state-of-the-art approach.
Multi-level Optimal Control with Neural Surrogate Models
Feb 12, 2024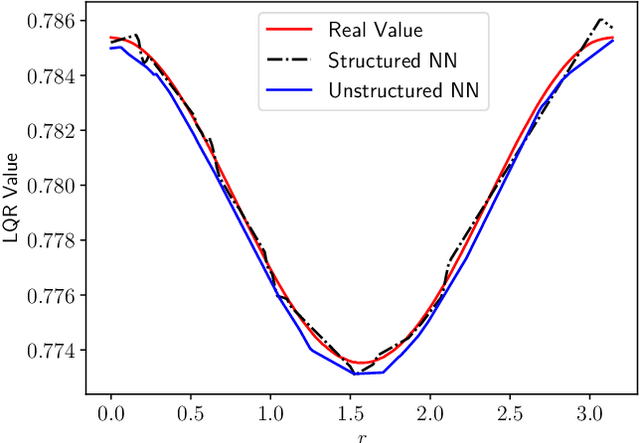
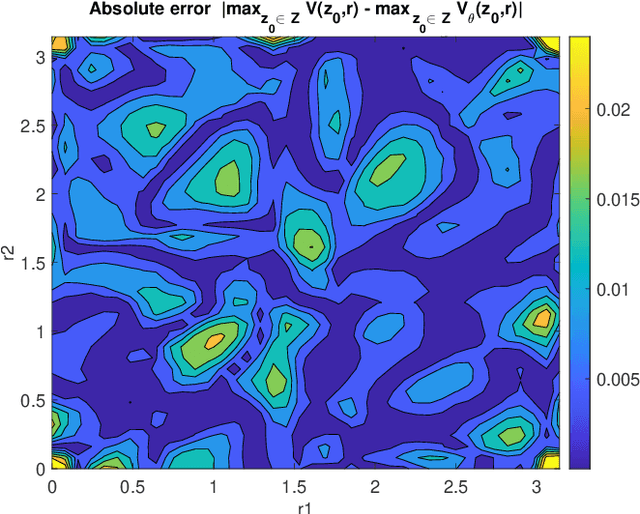
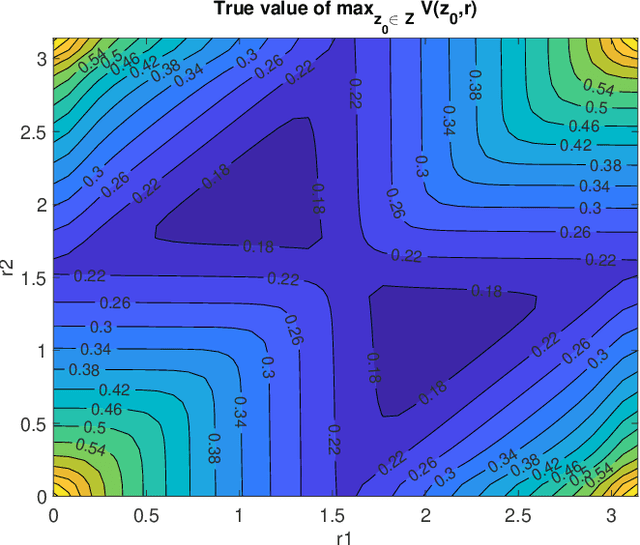
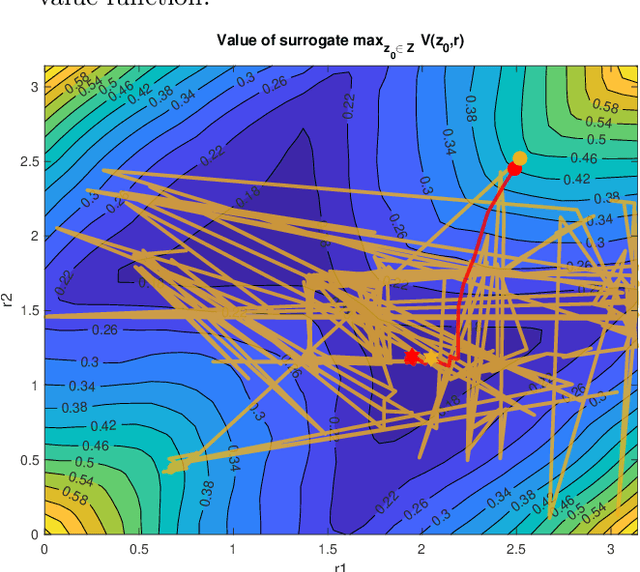
Optimal actuator and control design is studied as a multi-level optimisation problem, where the actuator design is evaluated based on the performance of the associated optimal closed loop. The evaluation of the optimal closed loop for a given actuator realisation is a computationally demanding task, for which the use of a neural network surrogate is proposed. The use of neural network surrogates to replace the lower level of the optimisation hierarchy enables the use of fast gradient-based and gradient-free consensus-based optimisation methods to determine the optimal actuator design. The effectiveness of the proposed surrogate models and optimisation methods is assessed in a test related to optimal actuator location for heat control.