Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-level Optimal Control with Neural Surrogate Models
Feb 12, 2024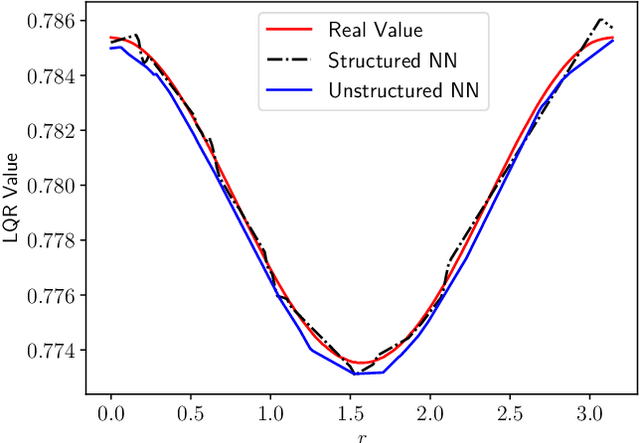
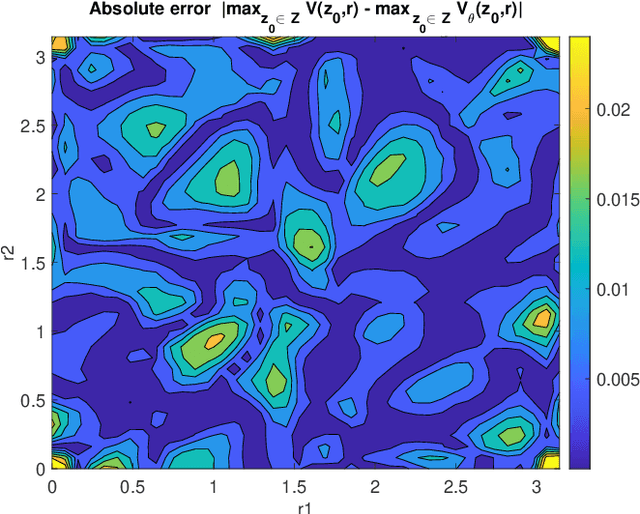
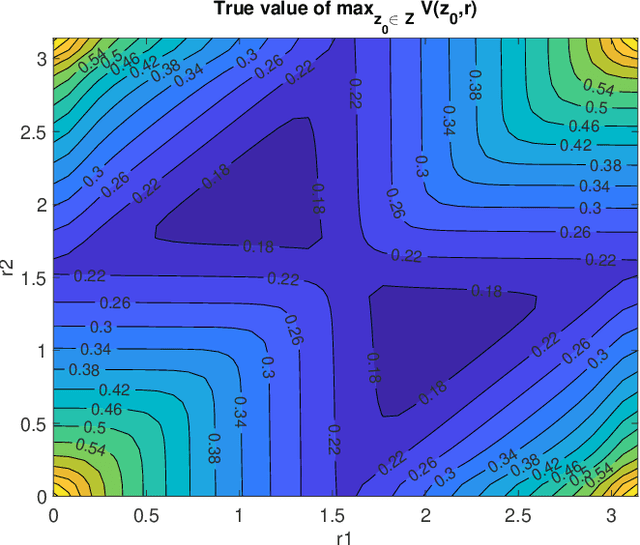
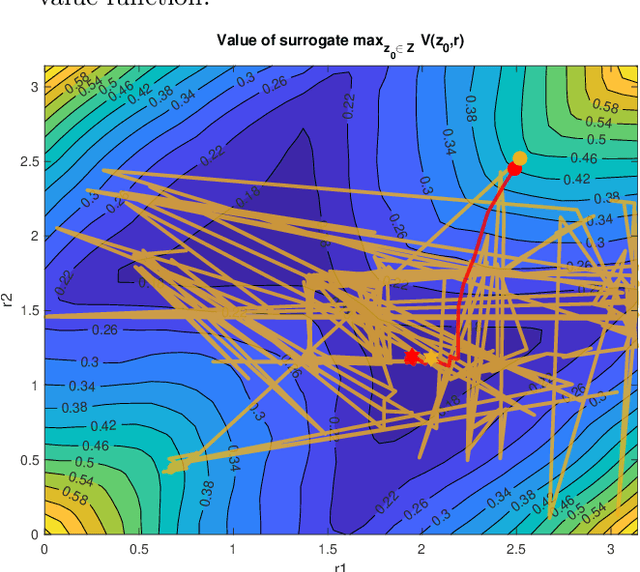
Optimal actuator and control design is studied as a multi-level optimisation problem, where the actuator design is evaluated based on the performance of the associated optimal closed loop. The evaluation of the optimal closed loop for a given actuator realisation is a computationally demanding task, for which the use of a neural network surrogate is proposed. The use of neural network surrogates to replace the lower level of the optimisation hierarchy enables the use of fast gradient-based and gradient-free consensus-based optimisation methods to determine the optimal actuator design. The effectiveness of the proposed surrogate models and optimisation methods is assessed in a test related to optimal actuator location for heat control.
Via