 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards a Unified Naming Scheme for Thermo-Active Soft Actuators: A Review of Materials, Working Principles, and Applications
Dec 11, 2023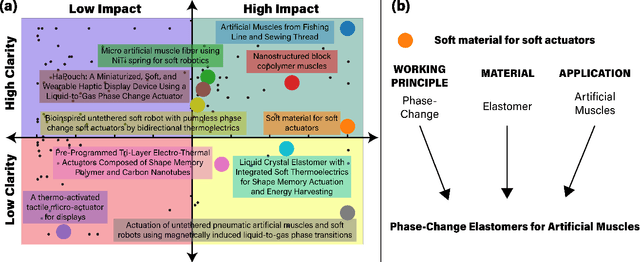
Soft robotics is a rapidly growing field that spans the fields of chemistry, materials science, and engineering. Due to the diverse background of the field, there have been contrasting naming schemes such as 'intelligent', 'smart' and 'adaptive' materials which add vagueness to the broad innovation among literature. Therefore, a clear, functional and descriptive naming scheme is proposed in which a previously vague name -- Soft Material for Soft Actuators -- can remain clear and concise -- Phase-Change Elastomers for Artificial Muscles. By synthesizing the working principle, material, and application into a naming scheme, the searchability of soft robotics can be enhanced and applied to other fields. The field of thermo-active soft actuators spans multiple domains and requires added clarity. Thermo-active actuators have potential for a variety of applications spanning virtual reality haptics to assistive devices. This review offers a comprehensive guide to selecting the type of thermo-active actuator when one has an application in mind. Additionally, it discusses future directions and improvements that are necessary for implementation.
Addressing Discontinuous Root-Finding for Subsequent Differentiability in Machine Learning, Inverse Problems, and Control
Jun 21, 2023



There are many physical processes that have inherent discontinuities in their mathematical formulations. This paper is motivated by the specific case of collisions between two rigid or deformable bodies and the intrinsic nature of that discontinuity. The impulse response to a collision is discontinuous with the lack of any response when no collision occurs, which causes difficulties for numerical approaches that require differentiability which are typical in machine learning, inverse problems, and control. We theoretically and numerically demonstrate that the derivative of the collision time with respect to the parameters becomes infinite as one approaches the barrier separating colliding from not colliding, and use lifting to complexify the solution space so that solutions on the other side of the barrier are directly attainable as precise values. Subsequently, we mollify the barrier posed by the unbounded derivatives, so that one can tunnel back and forth in a smooth and reliable fashion facilitating the use of standard numerical approaches. Moreover, we illustrate that standard approaches fail in numerous ways mostly due to a lack of understanding of the mathematical nature of the problem (e.g. typical backpropagation utilizes many rules of differentiation, but ignores L'Hopital's rule).
Software-based Automatic Differentiation is Flawed
May 05, 2023



Various software efforts embrace the idea that object oriented programming enables a convenient implementation of the chain rule, facilitating so-called automatic differentiation via backpropagation. Such frameworks have no mechanism for simplifying the expressions (obtained via the chain rule) before evaluating them. As we illustrate below, the resulting errors tend to be unbounded.
A Library for Representing Python Programs as Graphs for Machine Learning
Aug 15, 2022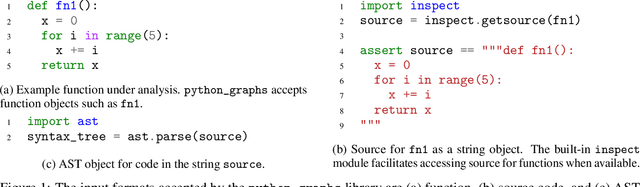
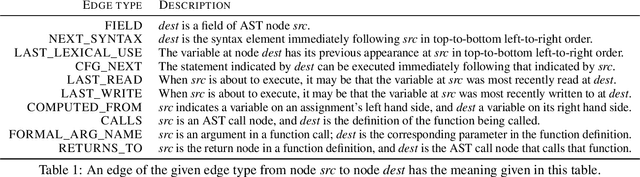
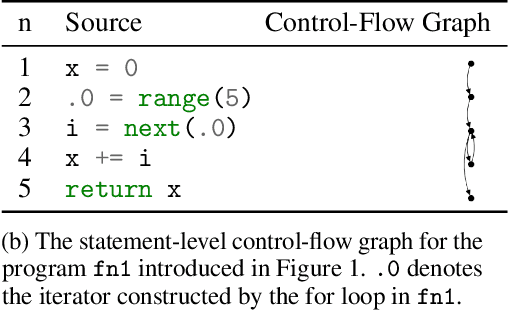
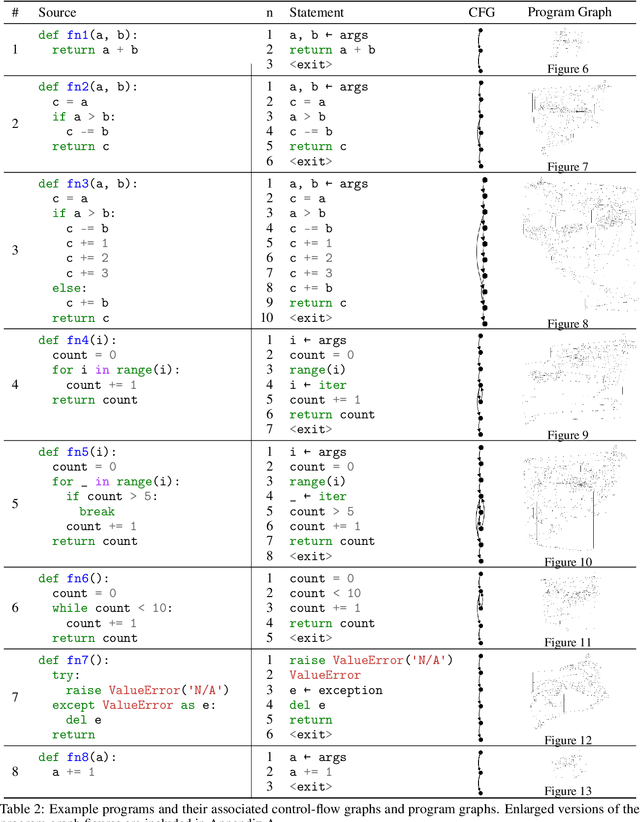
Graph representations of programs are commonly a central element of machine learning for code research. We introduce an open source Python library python_graphs that applies static analysis to construct graph representations of Python programs suitable for training machine learning models. Our library admits the construction of control-flow graphs, data-flow graphs, and composite ``program graphs'' that combine control-flow, data-flow, syntactic, and lexical information about a program. We present the capabilities and limitations of the library, perform a case study applying the library to millions of competitive programming submissions, and showcase the library's utility for machine learning research.