 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonolithic Units: Actuation, Sensing, and Simulation for Integrated Soft Robot Design
Nov 17, 2025This work introduces the Monolithic Unit (MU), an actuator-lattice-sensor building block for soft robotics. The MU integrates pneumatic actuation, a compliant lattice envelope, and candidate sites for optical waveguide sensing into a single printed body. In order to study reproducibility and scalability, a parametric design framework establishes deterministic rules linking actuator chamber dimensions to lattice unit cell size. Experimental homogenization of lattice specimens provides effective material properties for finite element simulation. Within this simulation environment, sensor placement is treated as a discrete optimization problem, where a finite set of candidate waveguide paths derived from lattice nodes is evaluated by introducing local stiffening, and the configuration minimizing deviation from baseline mechanical response is selected. Optimized models are fabricated and experimentally characterized, validating the preservation of mechanical performance while enabling embedded sensing. The workflow is further extended to scaled units and a two-finger gripper, demonstrating generality of the MU concept. This approach advances monolithic soft robotic design by combining reproducible co-design rules with simulation-informed sensor integration.
Agonist-Antagonist Pouch Motors: Bidirectional Soft Actuators Enhanced by Thermally Responsive Peltier Elements
Mar 16, 2024



In this study, we introduce a novel Mylar-based pouch motor design that leverages the reversible actuation capabilities of Peltier junctions to enable agonist-antagonist muscle mimicry in soft robotics. Addressing the limitations of traditional silicone-based materials, such as leakage and phase-change fluid degradation, our pouch motors filled with Novec 7000 provide a durable and leak-proof solution for geometric modeling. The integration of flexible Peltier junctions offers a significant advantage over conventional Joule heating methods by allowing active and reversible heating and cooling cycles. This innovation not only enhances the reliability and longevity of soft robotic applications but also broadens the scope of design possibilities, including the development of agonist-antagonist artificial muscles, grippers with can manipulate through flexion and extension, and an anchor-slip style simple crawler design. Our findings indicate that this approach could lead to more efficient, versatile, and durable robotic systems, marking a significant advancement in the field of soft robotics.
TVIM: Thermo-Active Variable Impedance Module: Evaluating Shear-Mode Capabilities of Polycaprolactone
Mar 16, 2024



In this work, we introduce an advanced thermo-active variable impedance module which builds upon our previous innovation in thermal-based impedance adjustment for actuation systems. Our initial design harnessed the temperature-responsive, viscoelastic properties of Polycaprolactone (PCL) to modulate stiffness and damping, facilitated by integrated flexible Peltier elements. While effective, the reliance on compressing and the inherent stress relaxation characteristics of PCL led to suboptimal response times in impedance adjustments. Addressing these limitations, the current iteration of our module pivots to a novel 'shear-mode' operation. By conducting comprehensive shear rheology analyses on PCL, we have identified a configuration that eliminates the viscoelastic delay, offering a faster response with improved heat transfer efficiency. A key advantage of our module lies in its scalability and elimination of additional mechanical actuators for impedance adjustment. The compactness and efficiency of thermal actuation through Peltier elements allow for significant downsizing, making these thermal, variable impedance modules exceptionally well-suited for applications where space constraints and actuator weight are critical considerations. This development represents a significant leap forward in the design of variable impedance actuators, offering a more versatile, responsive, and compact solution for a wide range of robotic and biomechanical applications.
Towards a Unified Naming Scheme for Thermo-Active Soft Actuators: A Review of Materials, Working Principles, and Applications
Dec 11, 2023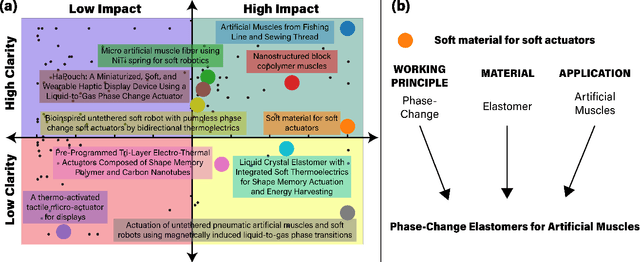
Soft robotics is a rapidly growing field that spans the fields of chemistry, materials science, and engineering. Due to the diverse background of the field, there have been contrasting naming schemes such as 'intelligent', 'smart' and 'adaptive' materials which add vagueness to the broad innovation among literature. Therefore, a clear, functional and descriptive naming scheme is proposed in which a previously vague name -- Soft Material for Soft Actuators -- can remain clear and concise -- Phase-Change Elastomers for Artificial Muscles. By synthesizing the working principle, material, and application into a naming scheme, the searchability of soft robotics can be enhanced and applied to other fields. The field of thermo-active soft actuators spans multiple domains and requires added clarity. Thermo-active actuators have potential for a variety of applications spanning virtual reality haptics to assistive devices. This review offers a comprehensive guide to selecting the type of thermo-active actuator when one has an application in mind. Additionally, it discusses future directions and improvements that are necessary for implementation.