 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParallel Distributional Deep Reinforcement Learning for Mapless Navigation of Terrestrial Mobile Robots
Aug 11, 2024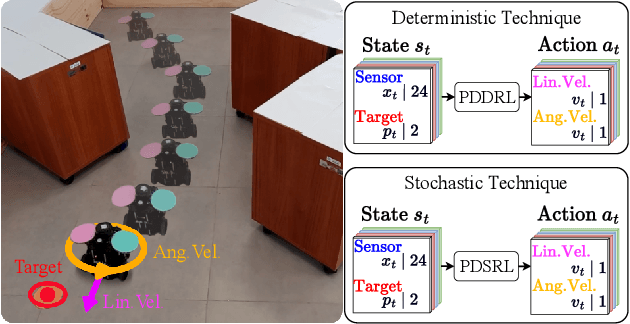
This paper introduces novel deep reinforcement learning (Deep-RL) techniques using parallel distributional actor-critic networks for navigating terrestrial mobile robots. Our approaches use laser range findings, relative distance, and angle to the target to guide the robot. We trained agents in the Gazebo simulator and deployed them in real scenarios. Results show that parallel distributional Deep-RL algorithms enhance decision-making and outperform non-distributional and behavior-based approaches in navigation and spatial generalization.
Enhanced Low-Dimensional Sensing Mapless Navigation of Terrestrial Mobile Robots Using Double Deep Reinforcement Learning Techniques
Oct 20, 2023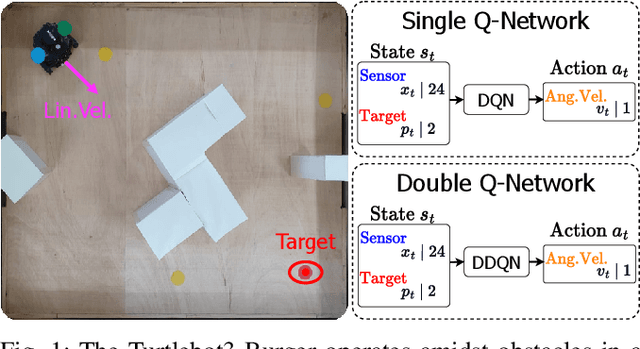
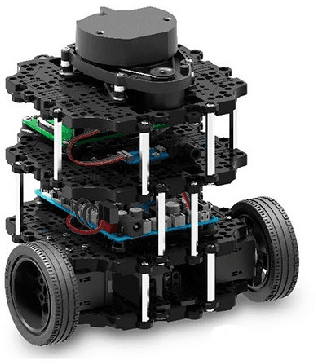
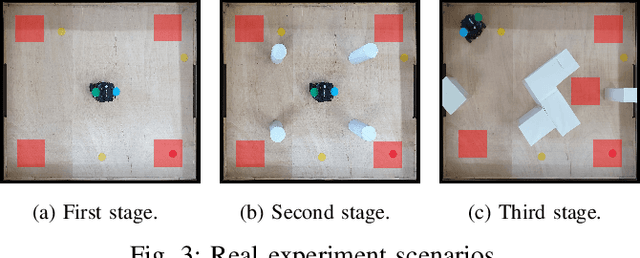
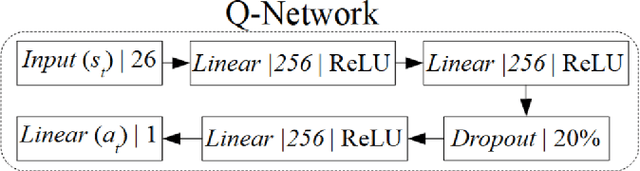
In this study, we present two distinct approaches within the realm of Deep Reinforcement Learning (Deep-RL) aimed at enhancing mapless navigation for a ground-based mobile robot. The research methodology primarily involves a comparative analysis between a Deep-RL strategy grounded in the foundational Deep Q-Network (DQN) algorithm, and an alternative approach based on the Double Deep Q-Network (DDQN) algorithm. The agents in these approaches leverage 24 measurements from laser range sampling, coupled with the agent's positional differentials and orientation relative to the target. This amalgamation of data influences the agents' determinations regarding navigation, ultimately dictating the robot's velocities. By embracing this parsimonious sensory framework as proposed, we successfully showcase the training of an agent for proficiently executing navigation tasks and adeptly circumventing obstacles. Notably, this accomplishment is attained without a dependency on intricate sensory inputs like those inherent to image-centric methodologies. The proposed methodology is evaluated in three different real environments, revealing that Double Deep structures significantly enhance the navigation capabilities of mobile robots compared to simple Q structures.
Double Deep Reinforcement Learning Techniques for Low Dimensional Sensing Mapless Navigation of Terrestrial Mobile Robots
Jan 26, 2023In this work, we present two Deep Reinforcement Learning (Deep-RL) approaches to enhance the problem of mapless navigation for a terrestrial mobile robot. Our methodology focus on comparing a Deep-RL technique based on the Deep Q-Network (DQN) algorithm with a second one based on the Double Deep Q-Network (DDQN) algorithm. We use 24 laser measurement samples and the relative position and angle of the agent to the target as information for our agents, which provide the actions as velocities for our robot. By using a low-dimensional sensing structure of learning, we show that it is possible to train an agent to perform navigation-related tasks and obstacle avoidance without using complex sensing information. The proposed methodology was successfully used in three distinct simulated environments. Overall, it was shown that Double Deep structures further enhance the problem for the navigation of mobile robots when compared to the ones with simple Q structures.