 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobin: A Novel Online Suicidal Text Corpus of Substantial Breadth and Scale
Sep 13, 2022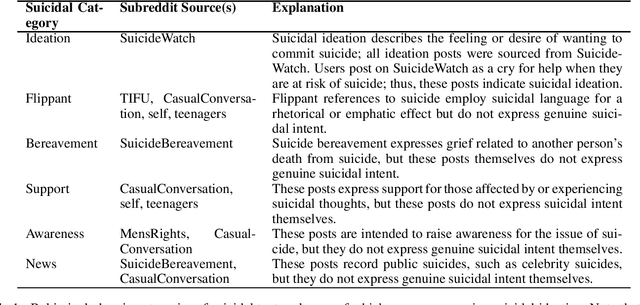
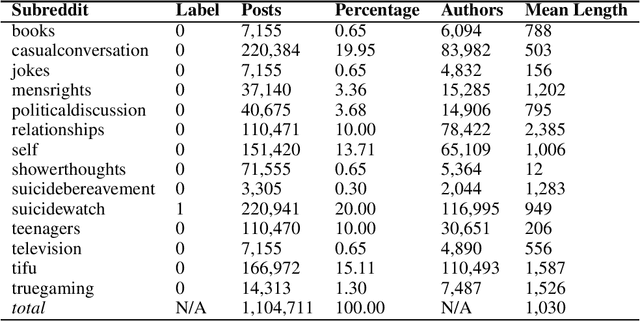
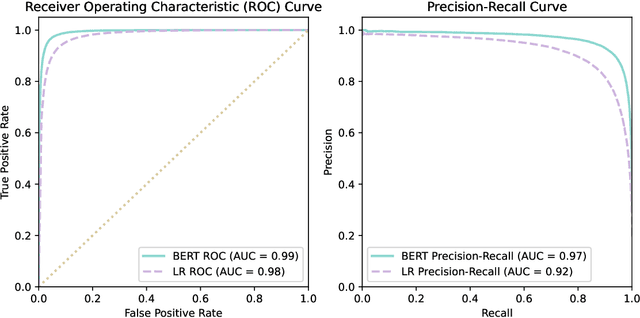
Suicide is a major public health crisis. With more than 20,000,000 suicide attempts each year, the early detection of suicidal intent has the potential to save hundreds of thousands of lives. Traditional mental health screening methods are time-consuming, costly, and often inaccessible to disadvantaged populations; online detection of suicidal intent using machine learning offers a viable alternative. Here we present Robin, the largest non-keyword generated suicidal corpus to date, consisting of over 1.1 million online forum postings. In addition to its unprecedented size, Robin is specially constructed to include various categories of suicidal text, such as suicide bereavement and flippant references, better enabling models trained on Robin to learn the subtle nuances of text expressing suicidal ideation. Experimental results achieve state-of-the-art performance for the classification of suicidal text, both with traditional methods like logistic regression (F1=0.85), as well as with large-scale pre-trained language models like BERT (F1=0.92). Finally, we release the Robin dataset publicly as a machine learning resource with the potential to drive the next generation of suicidal sentiment research.
Soft Multicopter Control using Neural Dynamics Identification
Sep 02, 2020
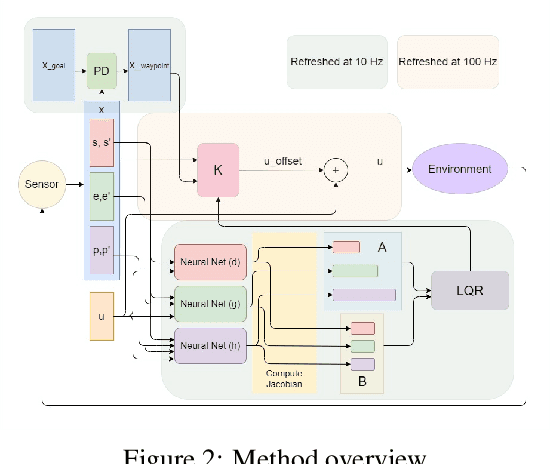
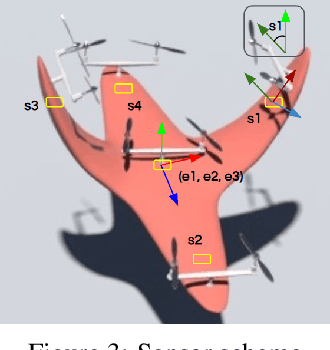
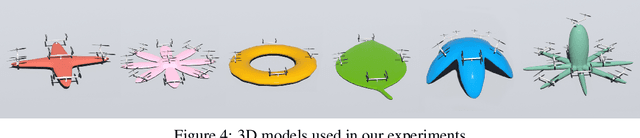
Dynamic control of a soft-body robot to deliver complex behaviors with low-dimensional actuation inputs is challenging. In this paper, we present a computational approach to automatically generate versatile, underactuated control policies that drives soft-bodied machines with complicated structures and nonlinear dynamics. Our target application is focused on the autonomous control of a soft multicopter, featured by its elastic material components, non-conventional shapes, and asymmetric rotor layouts, to precisely deliver compliant deformation and agile locomotion. The central piece of our approach lies in a lightweight neural surrogate model to identify and predict the temporal evolution of a set of geometric variables characterizing an elastic soft body. This physics-based learning model is further integrated into a Linear Quadratic Regulator (LQR) control loop enhanced by a novel online fixed-point relinearization scheme to accommodate the dynamic body balance, allowing an aggressive reduction of the computational overhead caused by the conventional full-scale sensing-simulation-control workflow. We demonstrate the efficacy of our approach by generating controllers for a broad spectrum of customized soft multicopter designs and testing them in a high-fidelity physics simulation environment. The control algorithm enables the multicopters to perform a variety of tasks, including hovering, trajectory tracking, cruising and active deforming.