 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAct, Perceive, and Plan in Belief Space for Robot Localization
Feb 21, 2020

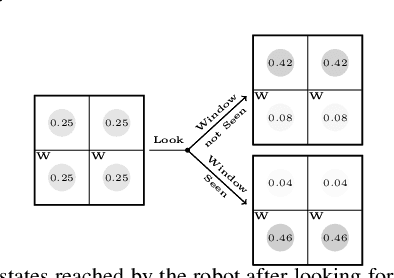

In this paper, we outline an interleaved acting and planning technique to rapidly reduce the uncertainty of the estimated robot's pose by perceiving relevant information from the environment, as recognizing an object or asking someone for a direction. Generally, existing localization approaches rely on low-level geometric features such as points, lines, and planes, while these approaches provide the desired accuracy, they may require time to converge, especially with incorrect initial guesses. In our approach, a task planner computes a sequence of action and perception tasks to actively obtain relevant information from the robot's perception system. We validate our approach in large state spaces, to show how the approach scales, and in real environments, to show the applicability of our method on real robots. We prove that our approach is sound, probabilistically complete, and tractable in practical cases.
Gaze Estimation for Assisted Living Environments
Sep 19, 2019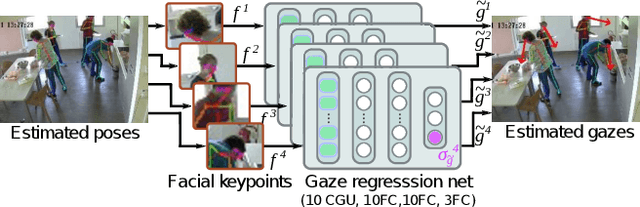
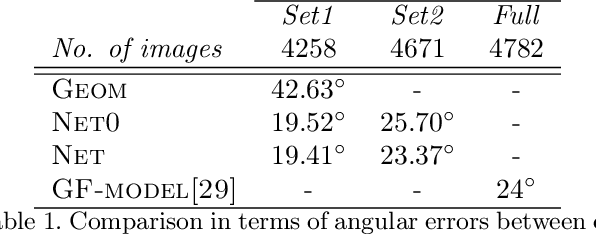

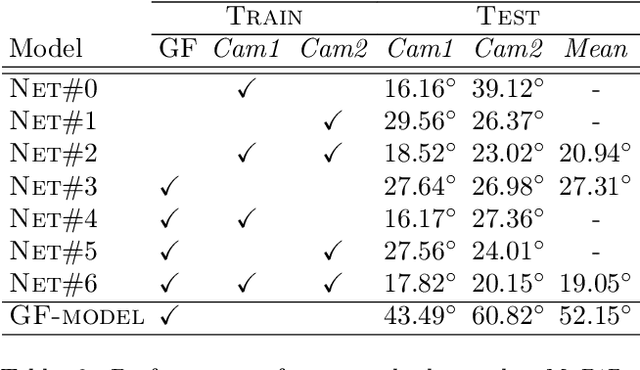
Effective assisted living environments must be able to perform inferences on how their occupants interact with one another as well as with surrounding objects. To accomplish this goal using a vision-based automated approach, multiple tasks such as pose estimation, object segmentation and gaze estimation must be addressed. Gaze direction in particular provides some of the strongest indications of how a person interacts with the environment. In this paper, we propose a simple neural network regressor that estimates the gaze direction of individuals in a multi-camera assisted living scenario, relying only on the relative positions of facial keypoints collected from a single pose estimation model. To handle cases of keypoint occlusion, our model exploits a novel confidence gated unit in its input layer. In addition to the gaze direction, our model also outputs an estimation of its own prediction uncertainty. Experimental results on a public benchmark demonstrate that our approach performs on pair with a complex, dataset-specific baseline, while its uncertainty predictions are highly correlated to the actual angular error of corresponding estimations. Finally, experiments on images from a real assisted living environment demonstrate the higher suitability of our model for its final application.
Proceedings of eNTERFACE 2015 Workshop on Intelligent Interfaces
Jan 19, 2018
The 11th Summer Workshop on Multimodal Interfaces eNTERFACE 2015 was hosted by the Numediart Institute of Creative Technologies of the University of Mons from August 10th to September 2015. During the four weeks, students and researchers from all over the world came together in the Numediart Institute of the University of Mons to work on eight selected projects structured around intelligent interfaces. Eight projects were selected and their reports are shown here.