 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSearch Self-play: Pushing the Frontier of Agent Capability without Supervision
Oct 21, 2025Reinforcement learning with verifiable rewards (RLVR) has become the mainstream technique for training LLM agents. However, RLVR highly depends on well-crafted task queries and corresponding ground-truth answers to provide accurate rewards, which requires massive human efforts and hinders the RL scaling processes, especially under agentic scenarios. Although a few recent works explore task synthesis methods, the difficulty of generated agentic tasks can hardly be controlled to provide effective RL training advantages. To achieve agentic RLVR with higher scalability, we explore self-play training for deep search agents, in which the learning LLM utilizes multi-turn search engine calling and acts simultaneously as both a task proposer and a problem solver. The task proposer aims to generate deep search queries with well-defined ground-truth answers and increasing task difficulty. The problem solver tries to handle the generated search queries and output the correct answer predictions. To ensure that each generated search query has accurate ground truth, we collect all the searching results from the proposer's trajectory as external knowledge, then conduct retrieval-augmentation generation (RAG) to test whether the proposed query can be correctly answered with all necessary search documents provided. In this search self-play (SSP) game, the proposer and the solver co-evolve their agent capabilities through both competition and cooperation. With substantial experimental results, we find that SSP can significantly improve search agents' performance uniformly on various benchmarks without any supervision under both from-scratch and continuous RL training setups. The code is at https://github.com/Alibaba-Quark/SSP.
SweepEvGS: Event-Based 3D Gaussian Splatting for Macro and Micro Radiance Field Rendering from a Single Sweep
Dec 16, 2024



Recent advancements in 3D Gaussian Splatting (3D-GS) have demonstrated the potential of using 3D Gaussian primitives for high-speed, high-fidelity, and cost-efficient novel view synthesis from continuously calibrated input views. However, conventional methods require high-frame-rate dense and high-quality sharp images, which are time-consuming and inefficient to capture, especially in dynamic environments. Event cameras, with their high temporal resolution and ability to capture asynchronous brightness changes, offer a promising alternative for more reliable scene reconstruction without motion blur. In this paper, we propose SweepEvGS, a novel hardware-integrated method that leverages event cameras for robust and accurate novel view synthesis across various imaging settings from a single sweep. SweepEvGS utilizes the initial static frame with dense event streams captured during a single camera sweep to effectively reconstruct detailed scene views. We also introduce different real-world hardware imaging systems for real-world data collection and evaluation for future research. We validate the robustness and efficiency of SweepEvGS through experiments in three different imaging settings: synthetic objects, real-world macro-level, and real-world micro-level view synthesis. Our results demonstrate that SweepEvGS surpasses existing methods in visual rendering quality, rendering speed, and computational efficiency, highlighting its potential for dynamic practical applications.
Ev-GS: Event-based Gaussian splatting for Efficient and Accurate Radiance Field Rendering
Jul 16, 2024



Computational neuromorphic imaging (CNI) with event cameras offers advantages such as minimal motion blur and enhanced dynamic range, compared to conventional frame-based methods. Existing event-based radiance field rendering methods are built on neural radiance field, which is computationally heavy and slow in reconstruction speed. Motivated by the two aspects, we introduce Ev-GS, the first CNI-informed scheme to infer 3D Gaussian splatting from a monocular event camera, enabling efficient novel view synthesis. Leveraging 3D Gaussians with pure event-based supervision, Ev-GS overcomes challenges such as the detection of fast-moving objects and insufficient lighting. Experimental results show that Ev-GS outperforms the method that takes frame-based signals as input by rendering realistic views with reduced blurring and improved visual quality. Moreover, it demonstrates competitive reconstruction quality and reduced computing occupancy compared to existing methods, which paves the way to a highly efficient CNI approach for signal processing.
Neuromorphic Imaging with Super-Resolution
Jul 08, 2024



Neuromorphic imaging is a bio-inspired technique that imitates the human retina to sense variations in a dynamic scene. It responds to pixel-level brightness changes by asynchronous streaming events and boasts microsecond temporal precision over a high dynamic range, yielding blur-free recordings under extreme illumination. Nevertheless, such a modality falls short in spatial resolution and leads to a low level of visual richness and clarity. Pursuing hardware upgrades is expensive and might cause compromised performance due to more burdens on computational requirements. Another option is to harness offline, plug-in-play neuromorphic super-resolution solutions. However, existing ones, which demand substantial sample volumes for lengthy training on massive computing resources, are largely restricted by real data availability owing to the current imperfect high-resolution devices, as well as the randomness and variability of motion. To tackle these challenges, we introduce the first self-supervised neuromorphic super-resolution prototype. It can be self-adaptive to per input source from any low-resolution camera to estimate an optimal, high-resolution counterpart of any scale, without the need of side knowledge and prior training. Evaluated on downstream event-driven tasks, such a simple yet effective method can obtain competitive results against the state-of-the-arts, significantly promoting flexibility but not sacrificing accuracy. It also delivers enhancements for inferior natural images and optical micrographs acquired under non-ideal imaging conditions, breaking through the limitations that are challenging to overcome with traditional frame techniques. In the current landscape where the use of high-resolution cameras for event-based sensing remains an open debate, our solution serves as a cost-efficient and practical alternative, paving the way for more intelligent imaging systems.
Neuromorphic Imaging with Joint Image Deblurring and Event Denoising
Sep 28, 2023



Neuromorphic imaging reacts to per-pixel brightness changes of a dynamic scene with high temporal precision and responds with asynchronous streaming events as a result. It also often supports a simultaneous output of an intensity image. Nevertheless, the raw events typically involve a great amount of noise due to the high sensitivity of the sensor, while capturing fast-moving objects at low frame rates results in blurry images. These deficiencies significantly degrade human observation and machine processing. Fortunately, the two information sources are inherently complementary -- events with microsecond temporal resolution, which are triggered by the edges of objects that are recorded in latent sharp images, can supply rich motion details missing from the blurry images. In this work, we bring the two types of data together and propose a simple yet effective unifying algorithm to jointly reconstruct blur-free images and noise-robust events, where an event-regularized prior offers auxiliary motion features for blind deblurring, and image gradients serve as a reference to regulate neuromorphic noise removal. Extensive evaluations on real and synthetic samples present our superiority over other competing methods in restoration quality and greater robustness to some challenging realistic scenarios. Our solution gives impetus to the improvement of both sensing data and paves the way for highly accurate neuromorphic reasoning and analysis.
Neuromorphic Imaging and Classification with Graph Learning
Sep 27, 2023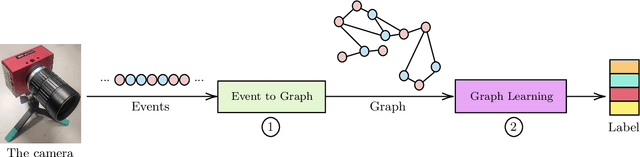
Bio-inspired neuromorphic cameras asynchronously record pixel brightness changes and generate sparse event streams. They can capture dynamic scenes with little motion blur and more details in extreme illumination conditions. Due to the multidimensional address-event structure, most existing vision algorithms cannot properly handle asynchronous event streams. While several event representations and processing methods have been developed to address such an issue, they are typically driven by a large number of events, leading to substantial overheads in runtime and memory. In this paper, we propose a new graph representation of the event data and couple it with a Graph Transformer to perform accurate neuromorphic classification. Extensive experiments show that our approach leads to better results and excels at the challenging realistic situations where only a small number of events and limited computational resources are available, paving the way for neuromorphic applications embedded into mobile facilities.
On the use of deep learning for phase recovery
Aug 02, 2023Phase recovery (PR) refers to calculating the phase of the light field from its intensity measurements. As exemplified from quantitative phase imaging and coherent diffraction imaging to adaptive optics, PR is essential for reconstructing the refractive index distribution or topography of an object and correcting the aberration of an imaging system. In recent years, deep learning (DL), often implemented through deep neural networks, has provided unprecedented support for computational imaging, leading to more efficient solutions for various PR problems. In this review, we first briefly introduce conventional methods for PR. Then, we review how DL provides support for PR from the following three stages, namely, pre-processing, in-processing, and post-processing. We also review how DL is used in phase image processing. Finally, we summarize the work in DL for PR and outlook on how to better use DL to improve the reliability and efficiency in PR. Furthermore, we present a live-updating resource (https://github.com/kqwang/phase-recovery) for readers to learn more about PR.