 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTailored minimal reservoir computing: on the bidirectional connection between nonlinearities in the reservoir and in data
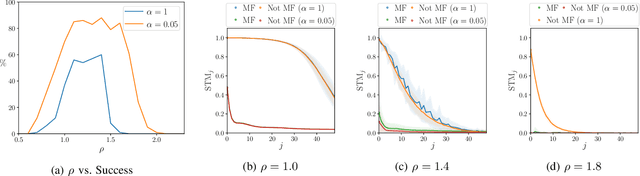
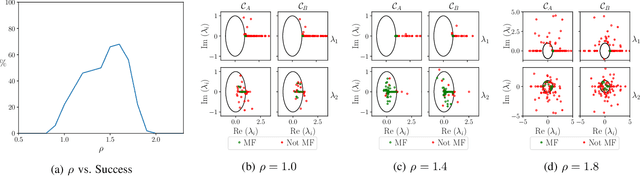
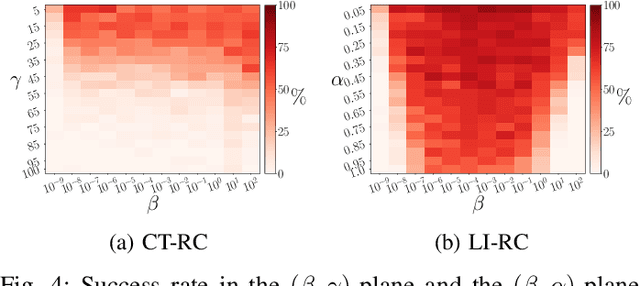
Apr 24, 2025We study how the degree of nonlinearity in the input data affects the optimal design of reservoir computers, focusing on how closely the model's nonlinearity should align with that of the data. By reducing minimal RCs to a single tunable nonlinearity parameter, we explore how the predictive performance varies with the degree of nonlinearity in the reservoir. To provide controlled testbeds, we generalize to the fractional Halvorsen system, a novel chaotic system with fractional exponents. Our experiments reveal that the prediction performance is maximized when the reservoir's nonlinearity matches the nonlinearity present in the data. In cases where multiple nonlinearities are present in the data, we find that the correlation dimension of the predicted signal is reconstructed correctly when the smallest nonlinearity is matched. We use this observation to propose a method for estimating the minimal nonlinearity in unknown time series by sweeping the reservoir exponent and identifying the transition to a successful reconstruction. Applying this method to both synthetic and real-world datasets, including financial time series, we demonstrate its practical viability. Finally, we transfer these insights to classical RC by augmenting traditional architectures with fractional, generalized reservoir states. This yields performance gains, particularly in resource-constrained scenarios such as physical reservoirs, where increasing reservoir size is impractical or economically unviable. Our work provides a principled route toward tailoring RCs to the intrinsic complexity of the systems they aim to model.
Controlling dynamical systems into unseen target states using machine learning
Dec 13, 2024



We present a novel, model-free, and data-driven methodology for controlling complex dynamical systems into previously unseen target states, including those with significantly different and complex dynamics. Leveraging a parameter-aware realization of next-generation reservoir computing, our approach accurately predicts system behavior in unobserved parameter regimes, enabling control over transitions to arbitrary target states. Crucially, this includes states with dynamics that differ fundamentally from known regimes, such as shifts from periodic to intermittent or chaotic behavior. The method's parameter-awareness facilitates non-stationary control, ensuring smooth transitions between states. By extending the applicability of machine learning-based control mechanisms to previously inaccessible target dynamics, this methodology opens the door to transformative new applications while maintaining exceptional efficiency. Our results highlight reservoir computing as a powerful alternative to traditional methods for dynamic system control.
Extrapolating tipping points and simulating non-stationary dynamics of complex systems using efficient machine learning
Dec 11, 2023Model-free and data-driven prediction of tipping point transitions in nonlinear dynamical systems is a challenging and outstanding task in complex systems science. We propose a novel, fully data-driven machine learning algorithm based on next-generation reservoir computing to extrapolate the bifurcation behavior of nonlinear dynamical systems using stationary training data samples. We show that this method can extrapolate tipping point transitions. Furthermore, it is demonstrated that the trained next-generation reservoir computing architecture can be used to predict non-stationary dynamics with time-varying bifurcation parameters. In doing so, post-tipping point dynamics of unseen parameter regions can be simulated.
Forecasting Trends in Food Security: a Reservoir Computing Approach
Dec 01, 2023Early warning systems are an essential tool for effective humanitarian action. Advance warnings on impending disasters facilitate timely and targeted response which help save lives, livelihoods, and scarce financial resources. In this work we present a new quantitative methodology to forecast levels of food consumption for 60 consecutive days, at the sub-national level, in four countries: Mali, Nigeria, Syria, and Yemen. The methodology is built on publicly available data from the World Food Programme's integrated global hunger monitoring system which collects, processes, and displays daily updates on key food security metrics, conflict, weather events, and other drivers of food insecurity across 90 countries (https://hungermap.wfp.org/). In this study, we assessed the performance of various models including ARIMA, XGBoost, LSTMs, CNNs, and Reservoir Computing (RC), by comparing their Root Mean Squared Error (RMSE) metrics. This comprehensive analysis spanned classical statistical, machine learning, and deep learning approaches. Our findings highlight Reservoir Computing as a particularly well-suited model in the field of food security given both its notable resistance to over-fitting on limited data samples and its efficient training capabilities. The methodology we introduce establishes the groundwork for a global, data-driven early warning system designed to anticipate and detect food insecurity.
Weight fluctuations in (deep) linear neural networks and a derivation of the inverse-variance flatness relation
Nov 23, 2023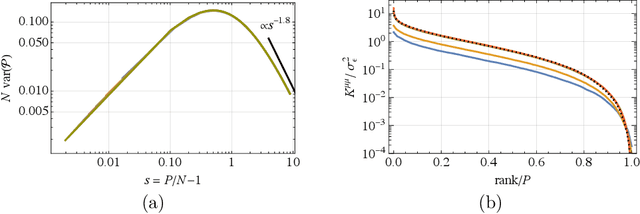



We investigate the stationary (late-time) training regime of single- and two-layer linear neural networks within the continuum limit of stochastic gradient descent (SGD) for synthetic Gaussian data. In the case of a single-layer network in the weakly oversampled regime, the spectrum of the noise covariance matrix deviates notably from the Hessian, which can be attributed to the broken detailed balance of SGD dynamics. The weight fluctuations are in this case generally anisotropic, but experience an isotropic loss. For a two-layer network, we obtain the stochastic dynamics of the weights in each layer and analyze the associated stationary covariances. We identify the inter-layer coupling as a new source of anisotropy for the weight fluctuations. In contrast to the single-layer case, the weight fluctuations experience an anisotropic loss, the flatness of which is inversely related to the fluctuation variance. We thereby provide an analytical derivation of the recently observed inverse variance-flatness relation in a deep linear network model.
Controlling dynamical systems to complex target states using machine learning: next-generation vs. classical reservoir computing
Jul 14, 2023



Controlling nonlinear dynamical systems using machine learning allows to not only drive systems into simple behavior like periodicity but also to more complex arbitrary dynamics. For this, it is crucial that a machine learning system can be trained to reproduce the target dynamics sufficiently well. On the example of forcing a chaotic parametrization of the Lorenz system into intermittent dynamics, we show first that classical reservoir computing excels at this task. In a next step, we compare those results based on different amounts of training data to an alternative setup, where next-generation reservoir computing is used instead. It turns out that while delivering comparable performance for usual amounts of training data, next-generation RC significantly outperforms in situations where only very limited data is available. This opens even further practical control applications in real world problems where data is restricted.
Exploring the limits of multifunctionality across different reservoir computers
May 23, 2022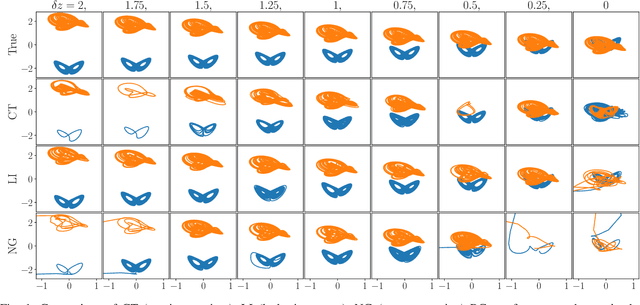
Multifunctional neural networks are capable of performing more than one task without changing any network connections. In this paper we explore the performance of a continuous-time, leaky-integrator, and next-generation `reservoir computer' (RC), when trained on tasks which test the limits of multifunctionality. In the first task we train each RC to reconstruct a coexistence of chaotic attractors from different dynamical systems. By moving the data describing these attractors closer together, we find that the extent to which each RC can reconstruct both attractors diminishes as they begin to overlap in state space. In order to provide a greater understanding of this inhibiting effect, in the second task we train each RC to reconstruct a coexistence of two circular orbits which differ only in the direction of rotation. We examine the critical effects that certain parameters can have in each RC to achieve multifunctionality in this extreme case of completely overlapping training data.
Controlling nonlinear dynamical systems into arbitrary states using machine learning
Feb 26, 2021
We propose a novel and fully data driven control scheme which relies on machine learning (ML). Exploiting recently developed ML-based prediction capabilities of complex systems, we demonstrate that nonlinear systems can be forced to stay in arbitrary dynamical target states coming from any initial state. We outline our approach using the examples of the Lorenz and the R\"ossler system and show how these systems can very accurately be brought not only to periodic but also to e.g. intermittent and different chaotic behavior. Having this highly flexible control scheme with little demands on the amount of required data on hand, we briefly discuss possible applications that range from engineering to medicine.
Reservoir Computing and its Sensitivity to Symmetry in the Activation Function
Sep 21, 2020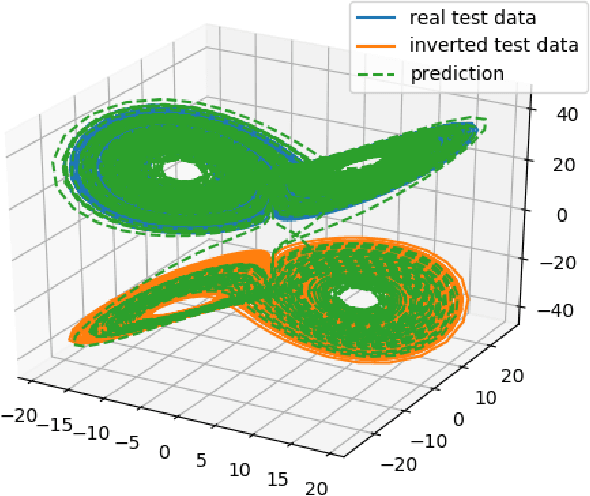
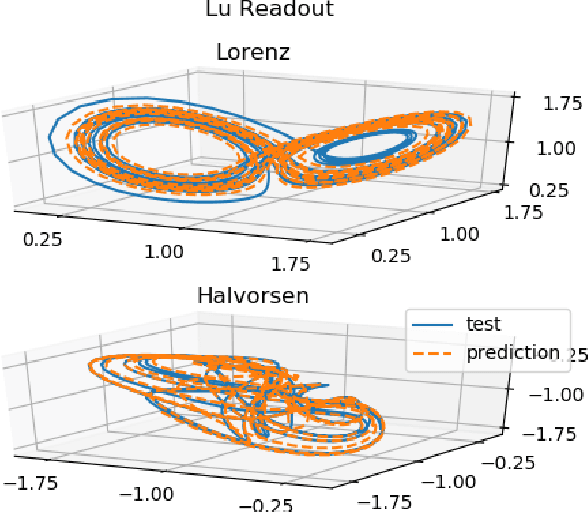
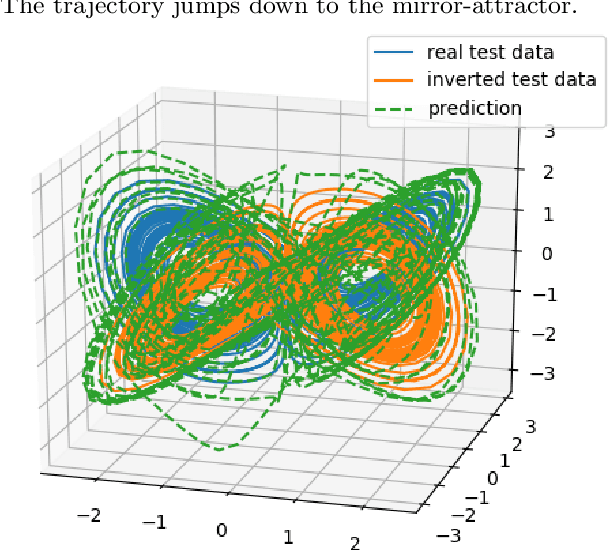
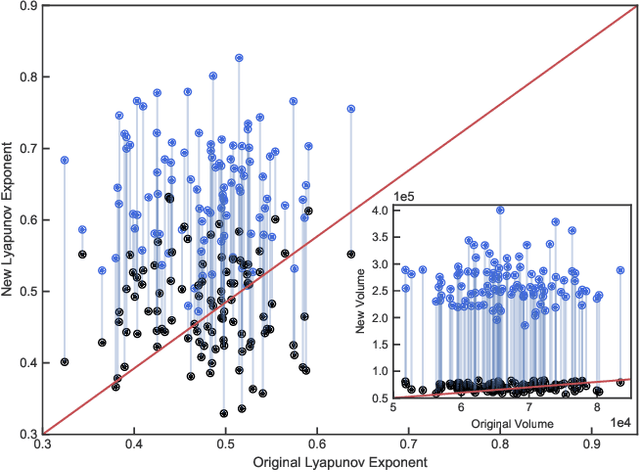
Reservoir computing has repeatedly been shown to be extremely successful in the prediction of nonlinear time-series. However, there is no complete understanding of the proper design of a reservoir yet. We find that the simplest popular setup has a harmful symmetry, which leads to the prediction of what we call mirror-attractor. We prove this analytically. Similar problems can arise in a general context, and we use them to explain the success or failure of some designs. The symmetry is a direct consequence of the hyperbolic tangent activation function. Further, four ways to break the symmetry are compared numerically: A bias in the output, a shift in the input, a quadratic term in the readout, and a mixture of even and odd activation functions. Firstly, we test their susceptibility to the mirror-attractor. Secondly, we evaluate their performance on the task of predicting Lorenz data with the mean shifted to zero. The short-time prediction is measured with the forecast horizon while the largest Lyapunov exponent and the correlation dimension are used to represent the climate. Finally, the same analysis is repeated on a combined dataset of the Lorenz attractor and the Halvorsen attractor, which we designed to reveal potential problems with symmetry. We find that all methods except the output bias are able to fully break the symmetry with input shift and quadratic readout performing the best overall.