 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderstanding Alignment in Multimodal LLMs: A Comprehensive Study
Jul 02, 2024



Preference alignment has become a crucial component in enhancing the performance of Large Language Models (LLMs), yet its impact in Multimodal Large Language Models (MLLMs) remains comparatively underexplored. Similar to language models, MLLMs for image understanding tasks encounter challenges like hallucination. In MLLMs, hallucination can occur not only by stating incorrect facts but also by producing responses that are inconsistent with the image content. A primary objective of alignment for MLLMs is to encourage these models to align responses more closely with image information. Recently, multiple works have introduced preference datasets for MLLMs and examined different alignment methods, including Direct Preference Optimization (DPO) and Proximal Policy Optimization (PPO). However, due to variations in datasets, base model types, and alignment methods, it remains unclear which specific elements contribute most significantly to the reported improvements in these works. In this paper, we independently analyze each aspect of preference alignment in MLLMs. We start by categorizing the alignment algorithms into two groups, offline (such as DPO), and online (such as online-DPO), and show that combining offline and online methods can improve the performance of the model in certain scenarios. We review a variety of published multimodal preference datasets and discuss how the details of their construction impact model performance. Based on these insights, we introduce a novel way of creating multimodal preference data called Bias-Driven Hallucination Sampling (BDHS) that needs neither additional annotation nor external models, and show that it can achieve competitive performance to previously published alignment work for multimodal models across a range of benchmarks.
Multi-View Deep Learning for Consistent Semantic Mapping with RGB-D Cameras
Dec 04, 2017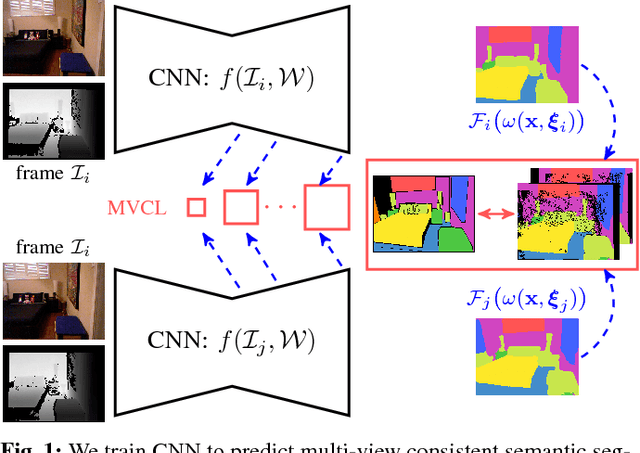
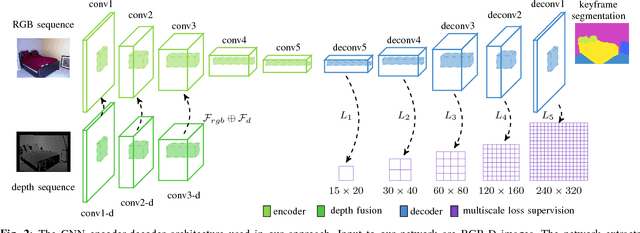
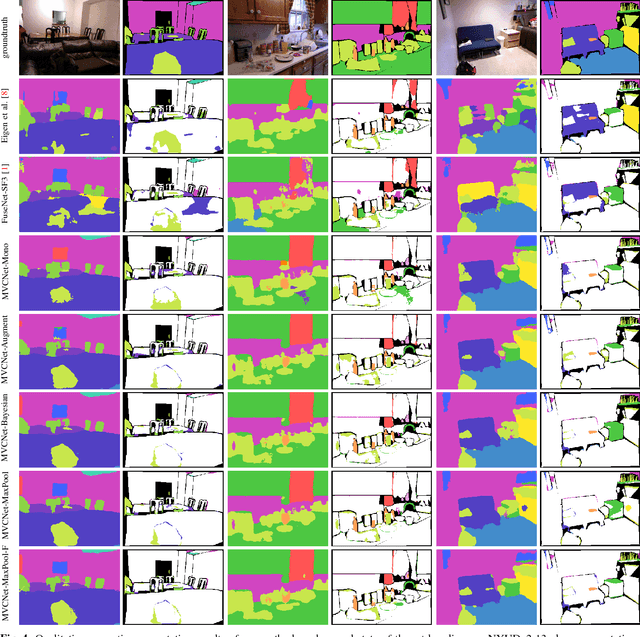
Visual scene understanding is an important capability that enables robots to purposefully act in their environment. In this paper, we propose a novel approach to object-class segmentation from multiple RGB-D views using deep learning. We train a deep neural network to predict object-class semantics that is consistent from several view points in a semi-supervised way. At test time, the semantics predictions of our network can be fused more consistently in semantic keyframe maps than predictions of a network trained on individual views. We base our network architecture on a recent single-view deep learning approach to RGB and depth fusion for semantic object-class segmentation and enhance it with multi-scale loss minimization. We obtain the camera trajectory using RGB-D SLAM and warp the predictions of RGB-D images into ground-truth annotated frames in order to enforce multi-view consistency during training. At test time, predictions from multiple views are fused into keyframes. We propose and analyze several methods for enforcing multi-view consistency during training and testing. We evaluate the benefit of multi-view consistency training and demonstrate that pooling of deep features and fusion over multiple views outperforms single-view baselines on the NYUDv2 benchmark for semantic segmentation. Our end-to-end trained network achieves state-of-the-art performance on the NYUDv2 dataset in single-view segmentation as well as multi-view semantic fusion.